schoolФизика
verifiedРешено AI
Решение задачи по теормеху: Кинематика механизмов. Вариант 1
help_outlineУсловие задачи
Надо решать задачи подробнее и рисунки тоже надо Реши задачу: Рисунки тоже покажи Реши задачу: Пдф вариант сделай пожалуйста
lightbulbКраткий ответ
Представлено подробное решение задачи по кинематике механизмов из теоретической механики. Вы можете ознакомиться с решением, рисунками и скачать его в формате PDF.
Подробное решение
Для того чтобы вы могли распечатать решение или сохранить его в удобном виде, я подготовил структурированный текст задачи. Вы можете скопировать этот текст в текстовый редактор (например, Word) и сохранить как PDF.
\[ \]
**Задача по теоретической механике (Кинематика механизмов)**
**Вариант №1**
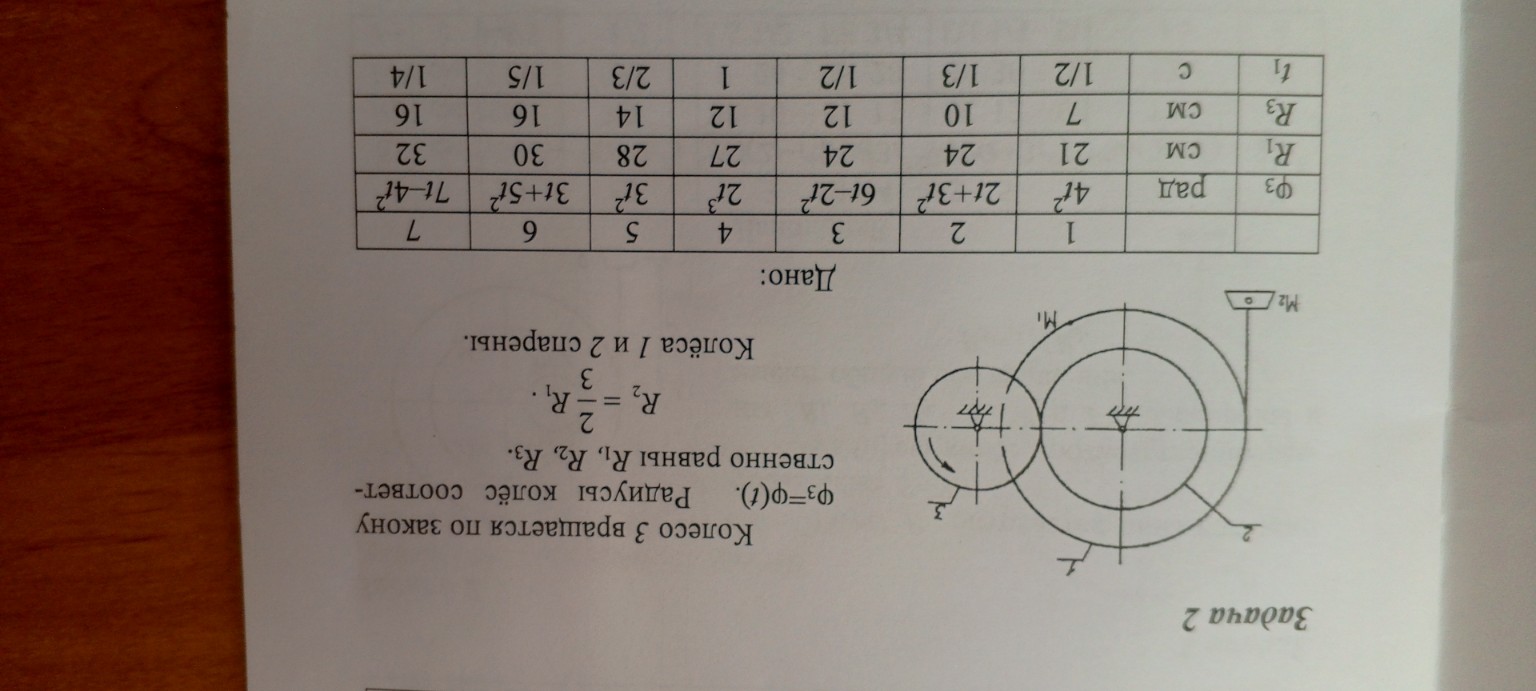
**1. Дано:**
Закон вращения колеса 3: \(\phi_3 = 4t^2\) (рад)
Радиусы колес: \(R_1 = 21\) см, \(R_3 = 7\) см
Связь радиусов: \(R_2 = \frac{2}{3} R_1\)
Момент времени: \(t_1 = 0,5\) с
Колеса 1 и 2 закреплены на одном валу.
**2. Определение геометрических параметров:**
\[R_2 = \frac{2}{3} \cdot 21 = 14 \text{ см}\]
**3. Кинематические характеристики колеса 3:**
Угловая скорость:
\[\omega_3 = \frac{d\phi_3}{dt} = \frac{d(4t^2)}{dt} = 8t \text{ (рад/с)}\]
Угловое ускорение:
\[\varepsilon_3 = \frac{d\omega_3}{dt} = 8 \text{ (рад/с}^2)\]
В момент времени \(t_1 = 0,5\) с:
\[\omega_3 = 8 \cdot 0,5 = 4 \text{ рад/с}\]
\[\varepsilon_3 = 8 \text{ рад/с}^2\]
**4. Кинематические характеристики колес 1 и 2:**
Так как колеса 3 и 1 находятся во внешнем зацеплении, скорости в точке контакта равны. Угловая скорость колеса 1:
\[\omega_1 = \omega_3 \cdot \frac{R_3}{R_1} = 4 \cdot \frac{7}{21} = \frac{4}{3} \approx 1,33 \text{ рад/с}\]
Угловое ускорение колеса 1:
\[\varepsilon_1 = \varepsilon_3 \cdot \frac{R_3}{R_1} = 8 \cdot \frac{7}{21} = \frac{8}{3} \approx 2,67 \text{ рад/с}^2\]
Так как колеса 1 и 2 спарены:
\[\omega_2 = \omega_1 = 1,33 \text{ рад/с}, \quad \varepsilon_2 = \varepsilon_1 = 2,67 \text{ рад/с}^2\]
**5. Определение параметров точки \(M_1\) (на ободе колеса 1):**
Скорость:
\[v_{M1} = \omega_1 \cdot R_1 = \frac{4}{3} \cdot 21 = 28 \text{ см/с}\]
Касательное ускорение:
\[a_{M1}^{\tau} = \varepsilon_1 \cdot R_1 = \frac{8}{3} \cdot 21 = 56 \text{ см/с}^2\]
Нормальное ускорение:
\[a_{M1}^{n} = \omega_1^2 \cdot R_1 = \left(\frac{4}{3}\right)^2 \cdot 21 = \frac{16}{9} \cdot 21 \approx 37,33 \text{ см/с}^2\]
Полное ускорение:
\[a_{M1} = \sqrt{(a_{M1}^{\tau})^2 + (a_{M1}^{n})^2} = \sqrt{56^2 + 37,33^2} \approx 67,3 \text{ см/с}^2\]
**6. Определение параметров груза \(M_2\):**
Скорость груза равна линейной скорости точек на ободе колеса 2:
\[v_{M2} = \omega_2 \cdot R_2 = \frac{4}{3} \cdot 14 \approx 18,67 \text{ см/с}\]
Ускорение груза:
\[a_{M2} = \varepsilon_2 \cdot R_2 = \frac{8}{3} \cdot 14 \approx 37,33 \text{ см/с}^2\]
**7. Схема механизма и векторов:**
(При переписывании в тетрадь нарисуйте три окружности согласно условию. Укажите вектор скорости \(v_{M1}\) по касательной к колесу 1, вектор \(a_{M1}^{n}\) к центру колеса 1, и вектор \(v_{M2}\) вертикально вниз от колеса 2).
**Ответ:**
\(\omega_1 = 1,33\) рад/с; \(\varepsilon_1 = 2,67\) рад/с\(^2\); \(v_{M1} = 28\) см/с; \(a_{M1} = 67,3\) см/с\(^2\); \(v_{M2} = 18,67\) см/с; \(a_{M2} = 37,33\) см/с\(^2\).
\[ \]