Расчёт статически неопределимой рамы методом перемещений
1. Определение степени статической неопределимости.
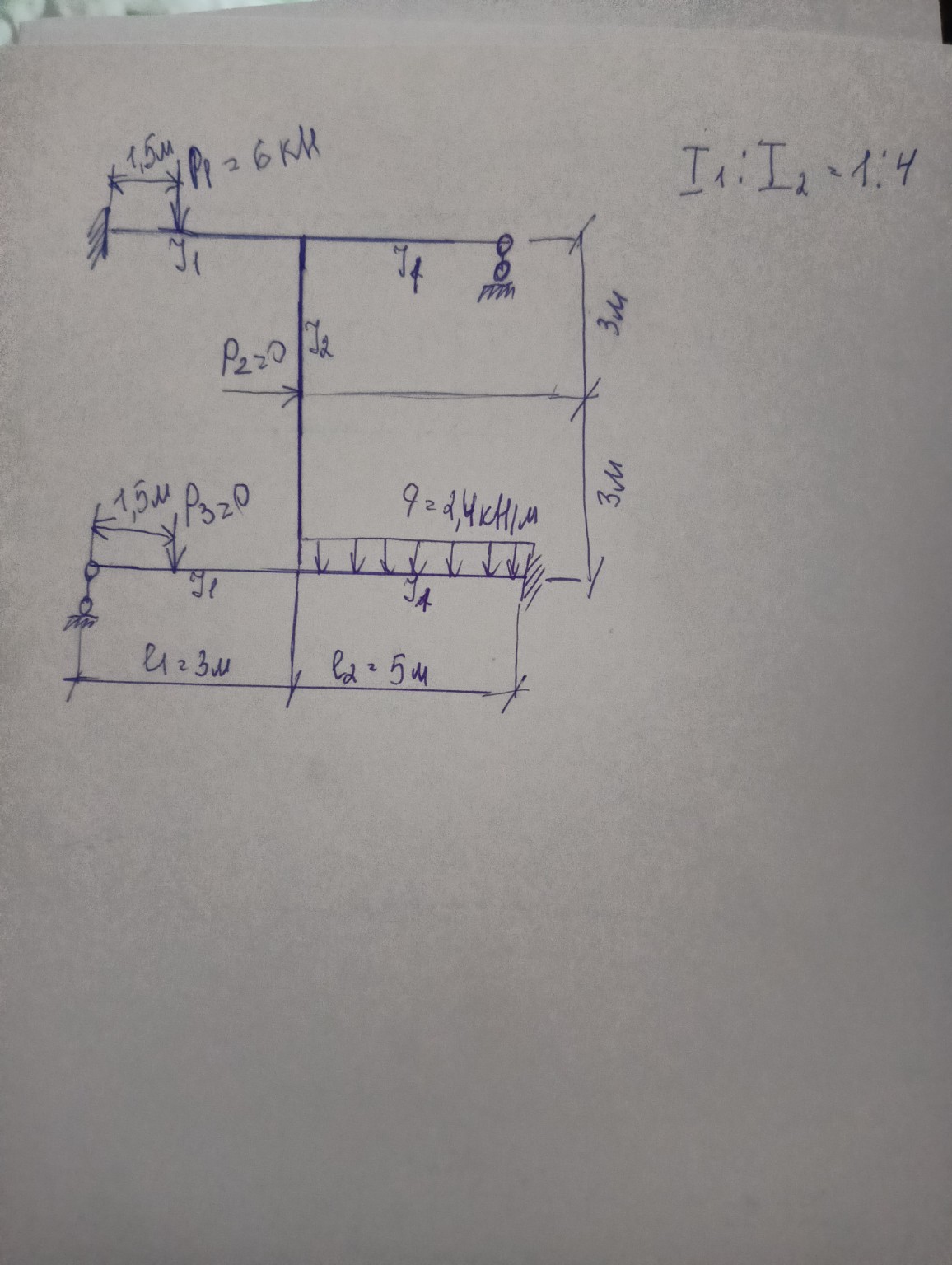
Рама имеет 3 опорные связи (заделка слева вверху, шарнирно-неподвижная опора слева внизу, шарнирно-подвижная опора справа вверху, заделка справа внизу). Количество стержней: 4. Количество узлов: 4. Количество опорных реакций: Заделка (слева вверху): 3 реакции (горизонтальная, вертикальная, момент). Шарнирно-неподвижная опора (слева внизу): 2 реакции (горизонтальная, вертикальная). Шарнирно-подвижная опора (справа вверху): 1 реакция (вертикальная). Заделка (справа внизу): 3 реакции (горизонтальная, вертикальная, момент). Итого: \(3 + 2 + 1 + 3 = 9\) опорных реакций. Количество уравнений статики для плоской рамы: 3. Количество внутренних шарниров: 0. Степень статической неопределимости: \(S = R - 3N + C\), где \(R\) - количество опорных реакций, \(N\) - количество стержней, \(C\) - количество внутренних шарниров. Или: \(S = R - 3\) (для абсолютно жёсткого тела) \(S = 9 - 3 = 6\) (если считать раму как одно жёсткое тело). Более точно для рам: \(S = 3C - K\), где \(C\) - количество замкнутых контуров, \(K\) - количество шарниров. В данной раме 1 замкнутый контур. \(S = 3 \cdot 1 = 3\). Степень кинематической неопределимости: Количество возможных независимых перемещений узлов. Узлы: 1. Верхний левый (заделка) - перемещений нет. 2. Верхний правый (шарнирно-подвижная опора) - возможно горизонтальное перемещение. 3. Нижний левый (шарнирно-неподвижная опора) - перемещений нет. 4. Нижний правый (заделка) - перемещений нет. Рама имеет один замкнутый контур. Возможны повороты узлов и линейные перемещения. Узлы 1 и 3 (левые) не имеют линейных перемещений. Узлы 2 и 4 (правые) могут иметь горизонтальное перемещение, если рама не имеет жёсткой связи по горизонтали. Однако, так как нижний левый узел шарнирно-неподвижный, а нижний правый - заделка, то горизонтальное перемещение нижнего стержня невозможно. Верхний правый узел - шарнирно-подвижная опора, она допускает горизонтальное перемещение. Но так как левая стойка жёстко связана с верхним и нижним ригелями, а нижний ригель заделан справа, то горизонтальное перемещение верхнего правого узла будет связано с деформацией рамы. Давайте определим количество независимых перемещений. Повороты узлов: Узел 1 (верхний левый): \(\varphi_1\) (поворот заделки невозможен, но это узел, к которому примыкают стержни). Узел 2 (верхний правый): \(\varphi_2\) Узел 3 (нижний левый): \(\varphi_3\) Узел 4 (нижний правый): \(\varphi_4\) (поворот заделки невозможен). Линейные перемещения: Горизонтальное перемещение: \(\Delta_x\). Вертикальное перемещение: \(\Delta_y\). Рассмотрим узлы: Узел 1 (верхняя левая заделка): \(\varphi_1 = 0\), \(\Delta_x = 0\), \(\Delta_y = 0\). Узел 2 (верхняя правая шарнирно-подвижная опора): \(\varphi_2 \neq 0\), \(\Delta_x \neq 0\), \(\Delta_y = 0\). Узел 3 (нижняя левая шарнирно-неподвижная опора): \(\varphi_3 \neq 0\), \(\Delta_x = 0\), \(\Delta_y = 0\). Узел 4 (нижняя правая заделка): \(\varphi_4 = 0\), \(\Delta_x = 0\), \(\Delta_y = 0\). Таким образом, независимые перемещения: 1. Поворот узла 2: \(\varphi_2\). 2. Поворот узла 3: \(\varphi_3\). 3. Горизонтальное перемещение верхнего ригеля (и, соответственно, верхнего правого узла) относительно нижнего ригеля: \(\Delta_x\). Это и есть степень кинематической неопределимости: \(n = 3\).2. Выбор основной системы метода перемещений.
Основная система метода перемещений получается из заданной рамы путём введения связей, препятствующих независимым перемещениям. В данном случае, мы вводим: 1. Жёсткую связь, препятствующую повороту узла 2. 2. Жёсткую связь, препятствующую повороту узла 3. 3. Жёсткую связь, препятствующую горизонтальному перемещению верхнего ригеля относительно нижнего. Это означает, что мы заменяем шарнирно-подвижную опору в узле 2 на заделку, а шарнирно-неподвижную опору в узле 3 на заделку. Однако, это не совсем так. Мы должны ввести связи, которые будут соответствовать нашим неизвестным перемещениям. Неизвестные: \(Z_1 = \varphi_2\), \(Z_2 = \varphi_3\), \(Z_3 = \Delta_x\). Основная система: Заменяем шарнир в узле 2 на заделку. Заменяем шарнир в узле 3 на заделку. Вводим дополнительную связь, препятствующую горизонтальному перемещению верхнего ригеля. Это можно сделать, например, введя жёсткую связь между верхним и нижним ригелями, или закрепив верхний ригель от горизонтального перемещения. Проще всего представить, что все узлы, где возможны повороты, заделаны, а все узлы, где возможны линейные перемещения, закреплены от этих перемещений. В нашем случае, основная система будет выглядеть как рама, где узлы 2 и 3 заделаны, а горизонтальное перемещение верхнего ригеля относительно нижнего предотвращено. Это означает, что все узлы, кроме опорных, считаются жёсткими. Узел 1 (верхняя левая заделка): \(\varphi_1 = 0\). Узел 2 (верхняя правая шарнирно-подвижная опора): \(\varphi_2\) - неизвестное. Узел 3 (нижняя левая шарнирно-неподвижная опора): \(\varphi_3\) - неизвестное. Узел 4 (нижняя правая заделка): \(\varphi_4 = 0\). Линейное перемещение: Горизонтальное перемещение верхнего ригеля относительно нижнего. Обозначим его \(\Delta\). Таким образом, у нас 3 неизвестных: \(\varphi_2\), \(\varphi_3\), \(\Delta\).3. Построение единичных эпюр моментов.
Для каждого из независимых перемещений мы строим единичную эпюру моментов, прикладывая соответствующую единичную силу (момент или силу).Единичное перемещение \(Z_1 = \varphi_2 = 1\):
Прикладываем единичный момент в узле 2. Моменты в стержнях: Стержень 1-2 (верхний ригель): \(M_{12} = \frac{2EI_1}{L_{12}} (2\varphi_1 + \varphi_2 - 3\frac{\Delta_y}{L_{12}})\) \(M_{21} = \frac{2EI_1}{L_{12}} (2\varphi_2 + \varphi_1 - 3\frac{\Delta_y}{L_{12}})\) Здесь \(L_{12} = l_1 + l_2 = 3 + 5 = 8\) м. \(\varphi_1 = 0\), \(\Delta_y = 0\). \(M_{12} = \frac{2EI_1}{8} (\varphi_2) = \frac{EI_1}{4} \varphi_2\) \(M_{21} = \frac{2EI_1}{8} (2\varphi_2) = \frac{EI_1}{2} \varphi_2\) При \(\varphi_2 = 1\): \(M_{12}^{(1)} = \frac{EI_1}{4}\) \(M_{21}^{(1)} = \frac{EI_1}{2}\) Стержень 2-4 (правая стойка): \(L_{24} = 3\) м. \(M_{24} = \frac{2EI_2}{L_{24}} (2\varphi_2 + \varphi_4 - 3\frac{\Delta_x}{L_{24}})\) \(M_{42} = \frac{2EI_2}{L_{24}} (2\varphi_4 + \varphi_2 - 3\frac{\Delta_x}{L_{24}})\) \(\varphi_4 = 0\), \(\Delta_x = 0\). \(M_{24} = \frac{2EI_2}{3} (2\varphi_2) = \frac{4EI_2}{3} \varphi_2\) \(M_{42} = \frac{2EI_2}{3} (\varphi_2) = \frac{2EI_2}{3} \varphi_2\) При \(\varphi_2 = 1\): \(M_{24}^{(1)} = \frac{4EI_2}{3}\) \(M_{42}^{(1)} = \frac{2EI_2}{3}\) Стержень 3-4 (нижний ригель): \(L_{34} = l_1 + l_2 = 8\) м. \(\varphi_3 = 0\), \(\varphi_4 = 0\), \(\Delta_y = 0\). Моменты в этом стержне будут равны нулю, так как он не связан с узлом 2 напрямую и не деформируется от поворота узла 2, если нет линейных перемещений. Стержень 1-3 (левая стойка): \(L_{13} = 3\) м. \(\varphi_1 = 0\), \(\varphi_3 = 0\), \(\Delta_x = 0\). Моменты в этом стержне будут равны нулю. Отношение жёсткостей: \(I_1 : I_2 = 1 : 4\), то есть \(I_2 = 4I_1\). Пусть \(EI_1 = EI\). Тогда \(EI_2 = 4EI\). Пересчитаем моменты с учётом жёсткостей: \(M_{12}^{(1)} = \frac{EI}{4}\) \(M_{21}^{(1)} = \frac{EI}{2}\) \(M_{24}^{(1)} = \frac{4E(4I)}{3} = \frac{16EI}{3}\) \(M_{42}^{(1)} = \frac{2E(4I)}{3} = \frac{8EI}{3}\)Единичное перемещение \(Z_2 = \varphi_3 = 1\):
Прикладываем единичный момент в узле 3. Стержень 1-3 (левая стойка): \(L_{13} = 3\) м. \(M_{13} = \frac{2EI_2}{L_{13}} (2\varphi_1 + \varphi_3 - 3\frac{\Delta_x}{L_{13}})\) \(M_{31} = \frac{2EI_2}{L_{13}} (2\varphi_3 + \varphi_1 - 3\frac{\Delta_x}{L_{13}})\) \(\varphi_1 = 0\), \(\Delta_x = 0\). \(M_{13} = \frac{2EI_2}{3} (\varphi_3) = \frac{2EI_2}{3} \varphi_3\) \(M_{31} = \frac{2EI_2}{3} (2\varphi_3) = \frac{4EI_2}{3} \varphi_3\) При \(\varphi_3 = 1\): \(M_{13}^{(2)} = \frac{2EI_2}{3} = \frac{2E(4I)}{3} = \frac{8EI}{3}\) \(M_{31}^{(2)} = \frac{4EI_2}{3} = \frac{4E(4I)}{3} = \frac{16EI}{3}\) Стержень 3-4 (нижний ригель): \(L_{34} = 8\) м. \(M_{34} = \frac{2EI_1}{L_{34}} (2\varphi_3 + \varphi_4 - 3\frac{\Delta_y}{L_{34}})\) \(M_{43} = \frac{2EI_1}{L_{34}} (2\varphi_4 + \varphi_3 - 3\frac{\Delta_y}{L_{34}})\) \(\varphi_4 = 0\), \(\Delta_y = 0\). \(M_{34} = \frac{2EI_1}{8} (2\varphi_3) = \frac{EI_1}{2} \varphi_3\) \(M_{43} = \frac{2EI_1}{8} (\varphi_3) = \frac{EI_1}{4} \varphi_3\) При \(\varphi_3 = 1\): \(M_{34}^{(2)} = \frac{EI}{2}\) \(M_{43}^{(2)} = \frac{EI}{4}\) Остальные стержни не деформируются.Единичное перемещение \(Z_3 = \Delta_x = 1\):
Прикладываем единичную силу, вызывающую горизонтальное перемещение \(\Delta_x = 1\). Стержень 1-3 (левая стойка): \(L_{13} = 3\) м. \(M_{13} = \frac{2EI_2}{L_{13}} (2\varphi_1 + \varphi_3 - 3\frac{\Delta_x}{L_{13}})\) \(M_{31} = \frac{2EI_2}{L_{13}} (2\varphi_3 + \varphi_1 - 3\frac{\Delta_x}{L_{13}})\) \(\varphi_1 = 0\), \(\varphi_3 = 0\). \(M_{13} = \frac{2EI_2}{3} (-3\frac{\Delta_x}{3}) = -\frac{2EI_2}{3} \Delta_x\) \(M_{31} = \frac{2EI_2}{3} (-3\frac{\Delta_x}{3}) = -\frac{2EI_2}{3} \Delta_x\) При \(\Delta_x = 1\): \(M_{13}^{(3)} = -\frac{2EI_2}{3} = -\frac{8EI}{3}\) \(M_{31}^{(3)} = -\frac{2EI_2}{3} = -\frac{8EI}{3}\) Стержень 2-4 (правая стойка): \(L_{24} = 3\) м. \(M_{24} = \frac{2EI_2}{L_{24}} (2\varphi_2 + \varphi_4 - 3\frac{\Delta_x}{L_{24}})\) \(M_{42} = \frac{2EI_2}{L_{24}} (2\varphi_4 + \varphi_2 - 3\frac{\Delta_x}{L_{24}})\) \(\varphi_2 = 0\), \(\varphi_4 = 0\). \(M_{24} = \frac{2EI_2}{3} (-3\frac{\Delta_x}{3}) = -\frac{2EI_2}{3} \Delta_x\) \(M_{42} = \frac{2EI_2}{3} (-3\frac{\Delta_x}{3}) = -\frac{2EI_2}{3} \Delta_x\) При \(\Delta_x = 1\): \(M_{24}^{(3)} = -\frac{2EI_2}{3} = -\frac{8EI}{3}\) \(M_{42}^{(3)} =