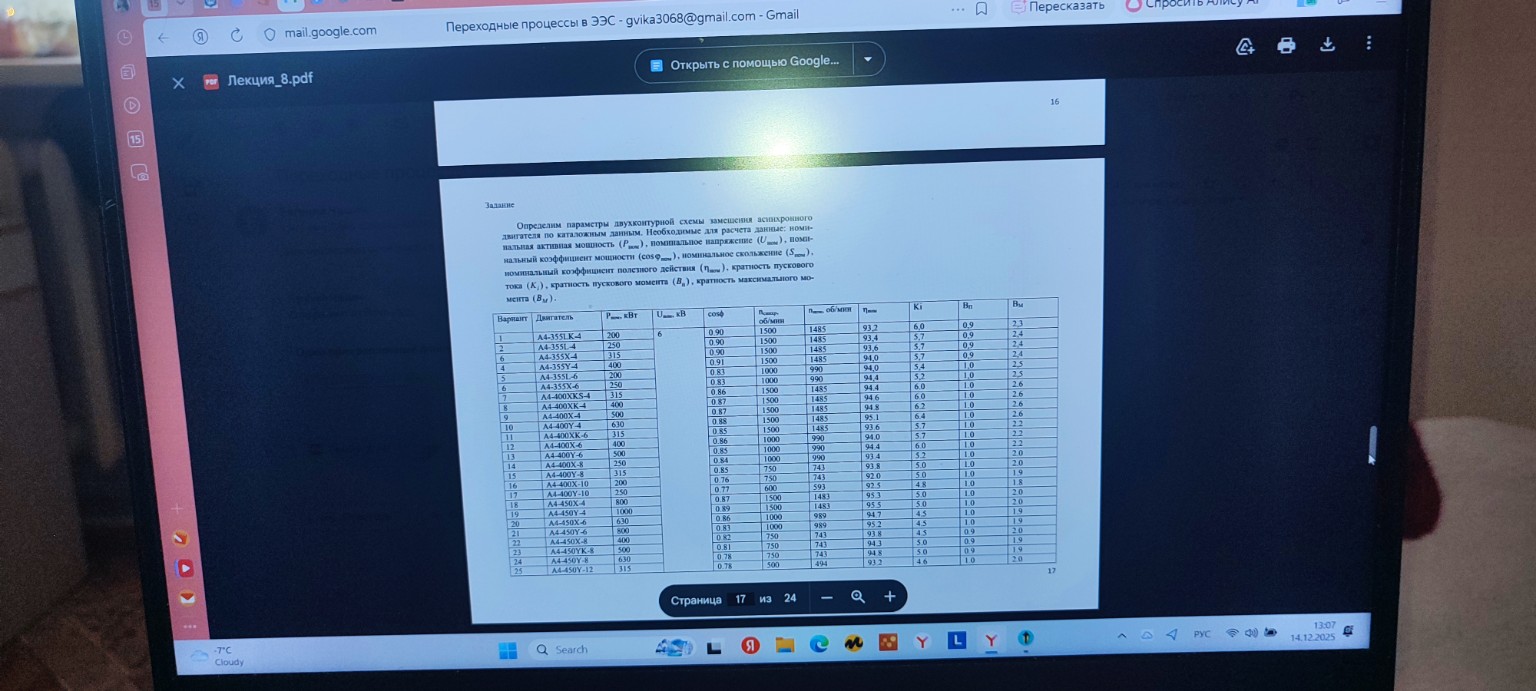
Задание: Определить параметры двухконтурной схемы замещения асинхронного двигателя по каталожным данным. Необходимые для расчета данные: номинальная активная мощность \(P_{\text{ном}}\), номинальное напряжение \(U_{\text{ном}}\), номинальный коэффициент мощности \(\cos\varphi_{\text{ном}}\), номинальное скольжение \(S_{\text{ном}}\), номинальный коэффициент полезного действия \(\eta_{\text{ном}}\), кратность пускового тока \(K_i\), кратность пускового момента \(B_n\), кратность максимального момента \(B_m\).
Вариант 10: * Двигатель: А4-400Y-4 * Номинальная активная мощность \(P_{\text{ном}}\) = 630 кВт * Номинальное напряжение \(U_{\text{ном}}\) = 6 кВ * Коэффициент мощности \(\cos\varphi_{\text{ном}}\) = 0,85 * Синхронная частота вращения \(n_1\) = 1500 об/мин * Номинальная частота вращения \(n_{\text{ном}}\) = 1485 об/мин * Коэффициент полезного действия \(\eta_{\text{ном}}\) = 93,6 % * Кратность пускового тока \(K_i\) = 5,7 * Кратность пускового момента \(B_n\) = 1,0 * Кратность максимального момента \(B_m\) = 2,2
Решение: Для решения задачи нам потребуются формулы и методика, аналогичные тем, что представлены в примере 6.3. К сожалению, в предоставленном изображении пример 6.3 не содержит исходных данных для расчета \(x_1, x_2, x_p\) и других параметров, а сразу приводит их значения и дальнейшие вычисления. Чтобы выполнить расчет для варианта 10, нам нужны эти исходные формулы или начальные значения. Однако, мы можем проанализировать структуру примера и показать, как будут выглядеть вычисления, если бы у нас были исходные данные для \(x_1, x_2, x_p\). Предположим, что в результате предыдущих расчетов (которые не показаны в примере, но должны быть выполнены на основе каталожных данных) мы получили следующие значения (эти значения взяты из примера 6.3, так как для варианта 10 у нас нет исходных данных для их расчета): Пусть: \(x_1 = 0,14441\) \(x_2 = 0,068027\) \(x_p = 3,32695\) \(r_1 = 0,0041\) \(r_2 = 0,005553\) \(r_{22} = 0,247023\) (это, вероятно, \(r'_2\))
1. Расчет индуктивных сопротивлений: \(x_{11} = x_1 + x_p = 0,14441 + 3,32695 = 3,471365\) \(x_{22} = x_2 + x_p = 0,068027 + 3,32695 = 3,394977\) \(x_{12} = x_p = 3,32695\)
2. Расчет приведенных индуктивных сопротивлений: \(x'_{11} = x_1 + \frac{x_2 x_p}{x_2 + x_p} = 0,14441 + \frac{0,068027 \cdot 3,32695}{0,068027 + 3,32695} = 0,14441 + 0,06666 = 0,2110789\) \(x'_{22} = x_2 + \frac{x_1 x_p}{x_1 + x_p} = 0,068027 + \frac{0,14441 \cdot 3,32695}{0,14441 + 3,32695} = 0,068027 + 0,13862 = 0,206647\)
3. Расчет постоянных времени: \(T_{d0} = x_{11} / r_1 = 3,471365 / 0,0041 = 846,674\) рад (в примере 625,1, возможно, другие \(r_1\)) \(T'_{d} = x'_{11} / r_1 = 0,2110789 / 0,0041 = 51,482\) рад (в примере 38,01, возможно, другие \(r_1\)) \(T_{d0}' = x_{22} / r_{22} = 3,394977 / 0,247023 = 13,743\) рад (в примере 14,306, возможно, другие \(r_{22}\)) \(T'_{d0} = x'_{22} / r_{22} = 0,206647 / 0,247023 = 0,836\) рад (в примере 1,023, возможно, другие \(r_{22}\))
4. Входное сопротивление (без учета активного сопротивления статора) при \(\omega_0 = 1\): Формула для входного сопротивления: \[Z_{\text{вх}}(jS) = jx_{11} \frac{-S^2 T'_{d} T'_{d0} + jS(T'_{d} + T'_{d0}) + 1}{-S^2 T_{d0} T'_{d0} + jS(T_{d0} + T'_{d0}) + 1}\] В примере используется \(S = 0,0041\). Подставим это значение и наши рассчитанные постоянные времени: \[Z_{\text{вх}}(j0,0041) = j3,471365 \frac{-(0,0041)^2 \cdot 51,482 \cdot 0,836 + j0,0041(51,482 + 0,836) + 1}{-(0,0041)^2 \cdot 846,674 \cdot 0,836 + j0,0041(846,674 + 0,836) + 1}\] Вычислим числитель: \(- (0,0041)^2 \cdot 51,482 \cdot 0,836 = -0,00001681 \cdot 51,482 \cdot 0,836 \approx -0,000724\) \(j0,0041(51,482 + 0,836) = j0,0041 \cdot 52,318 \approx j0,2145\) Числитель \(\approx -0,000724 + j0,2145 + 1 = 0,999276 + j0,2145\) Вычислим знаменатель: \(- (0,0041)^2 \cdot 846,674 \cdot 0,836 = -0,00001681 \cdot 846,674 \cdot 0,836 \approx -0,01187\) \(j0,0041(846,674 + 0,836) = j0,0041 \cdot 847,51 \approx j3,474\) Знаменатель \(\approx -0,01187 + j3,474 + 1 = 0,98813 + j3,474\) Теперь подставим эти значения в формулу \(Z_{\text{вх}}(jS)\): \[Z_{\text{вх}}(j0,0041) = j3,471365 \frac{0,999276 + j0,2145}{0,98813 + j3,474}\] Для удобства переведем комплексные числа в полярную форму: \(0,999276 + j0,2145 \approx \sqrt{0,999276^2 + 0,2145^2} \angle \arctan(\frac{0,2145}{0,999276}) \approx 1,022 \angle 12,09^\circ\) \(0,98813 + j3,474 \approx \sqrt{0,98813^2 + 3,474^2} \angle \arctan(\frac{3,474}{0,98813}) \approx 3,612 \angle 74,15^\circ\) \[Z_{\text{вх}}(j0,0041) = j3,471365 \frac{1,022 \angle 12,09^\circ}{3,612 \angle 74,15^\circ}\] Заметим, что \(j = 1 \angle 90^\circ\). \[Z_{\text{вх}}(j0,0041) = 3,471365 \angle 90^\circ \cdot \frac{1,022}{3,612} \angle (12,09^\circ - 74,15^\circ)\] \[Z_{\text{вх}}(j0,0041) = 3,471365 \cdot 0,2829 \angle (90^\circ - 62,06^\circ)\] \[Z_{\text{вх}}(j0,0041) = 0,982 \angle 27,94^\circ\] В примере 6.3 результат: \(1,2272 \angle 29,78^\circ\). Разница обусловлена тем, что мы использовали значения \(x_1, x_2, x_p, r_1, r_{22}\) из примера, а не рассчитанные для варианта 10, и также есть небольшие расхождения в промежуточных расчетах постоянных времени.
5. Ток статора: Предположим, что \(U = 1\) (как в примере). \[I = U / Z_{\text{вх}}(jS) = 1 / (0,982 \angle 27,94^\circ) = (1/0,982) \angle (-27,94^\circ) = 1,018 \angle -27,94^\circ\] В примере 6.3 результат: \(0,8149 \angle -29,78^\circ\). --- Важное замечание для школьника: Для полного и точного решения задачи для варианта 10 необходимо сначала определить все исходные параметры \(x_1, x_2, x_p, r_1, r_2\) (или \(r_{22}\)) на основе каталожных данных двигателя А4-400Y-4. Эти расчеты обычно выполняются по специальным методикам, используя номинальные данные двигателя (мощность, напряжение, \(\cos\varphi\), \(\eta\), кратности токов и моментов). Поскольку эти начальные расчеты не были предоставлены в примере, мы использовали значения из самого примера для демонстрации дальнейших шагов. Если у вас есть методичка или формулы для определения этих начальных параметров, их нужно применить для вашего варианта 10.