schoolФизика
verifiedРешено AI
Расшифровка обозначений на схеме движения точки
help_outlineУсловие задачи
Реши задачу: Что ознает буквы на картине
lightbulbКраткий ответ
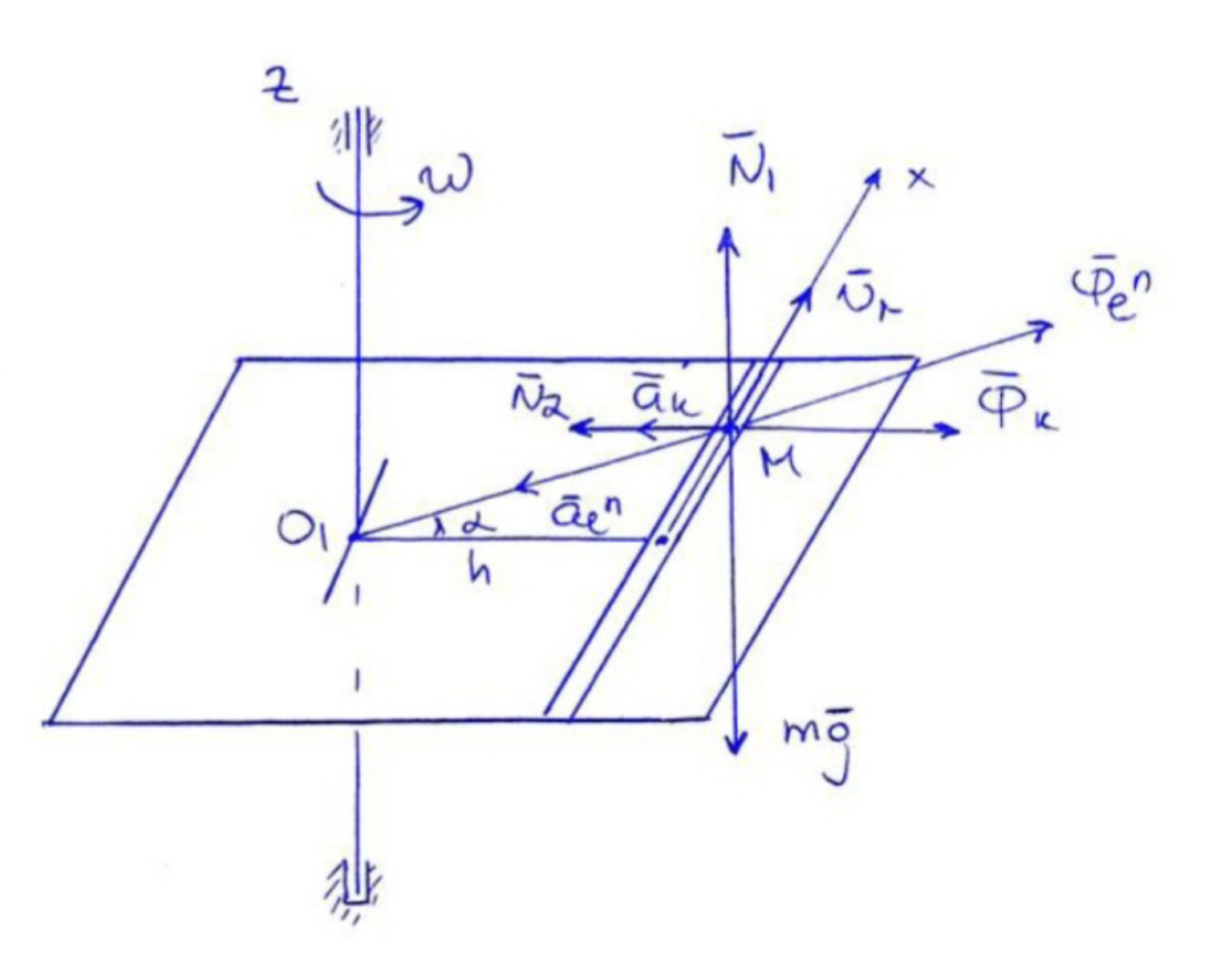
На рисунке представлена схема сложного движения точки по вращающейся плоскости. Обозначения описывают геометрические параметры, оси координат, угловую скорость и кинематические характеристики движения.
Подробное решение
На представленном рисунке изображена физическая схема движения материальной точки \(M\) по вращающейся плоскости. Это классическая задача из раздела теоретической механики, посвященная сложному движению точки.
Ниже приведена расшифровка всех обозначений, которые можно переписать в тетрадь:
1. Геометрические параметры и оси:
\(z\) — вертикальная ось вращения системы.
\(O_1\) — точка пересечения оси вращения с плоскостью.
\(x\) — подвижная ось, направленная вдоль траектории движения точки по плоскости.
\(h\) — кратчайшее расстояние от точки до оси вращения (радиус вращения).
\(\alpha\) — угол наклона или ориентации в плоскости.
\(\omega\) — угловая скорость вращения плоскости вокруг оси \(z\).
2. Кинематические характеристики (ускорения и скорости):
\(v_r\) — относительная скорость точки \(M\) (скорость движения вдоль желоба/оси \(x\)).
\(a_e^n\) — нормальное переносное ускорение (центростремительное ускорение точки плоскости, с которой в данный момент совпадает точка \(M\)).
\(a_k\) — ускорение Кориолиса (поворотное ускорение), возникающее из-за вращения системы и относительного движения точки.
3. Силы и динамические характеристики:
\(m\vec{g}\) — сила тяжести, действующая на точку \(M\) (\(m\) — масса, \(g\) — ускорение свободного падения).
\(N_1, N_2\) — составляющие силы реакции опоры (нормальные реакции плоскости и направляющей).
\(\Phi_e^n\) — центробежная сила инерции (переносная сила инерции).
\(\Phi_k\) — сила инерции Кориолиса.
Краткое пояснение для тетради:
На схеме показан метод кинетостатики (принцип Даламбера), где к реальным силам (\(mg, N\)) добавлены силы инерции (\(\Phi\)), чтобы составить уравнение равновесия в подвижной системе координат. Основное уравнение для данной точки в векторном виде выглядит так:
\[ m\vec{a}_r = \sum \vec{F} + \vec{\Phi}_e + \vec{\Phi}_k \]