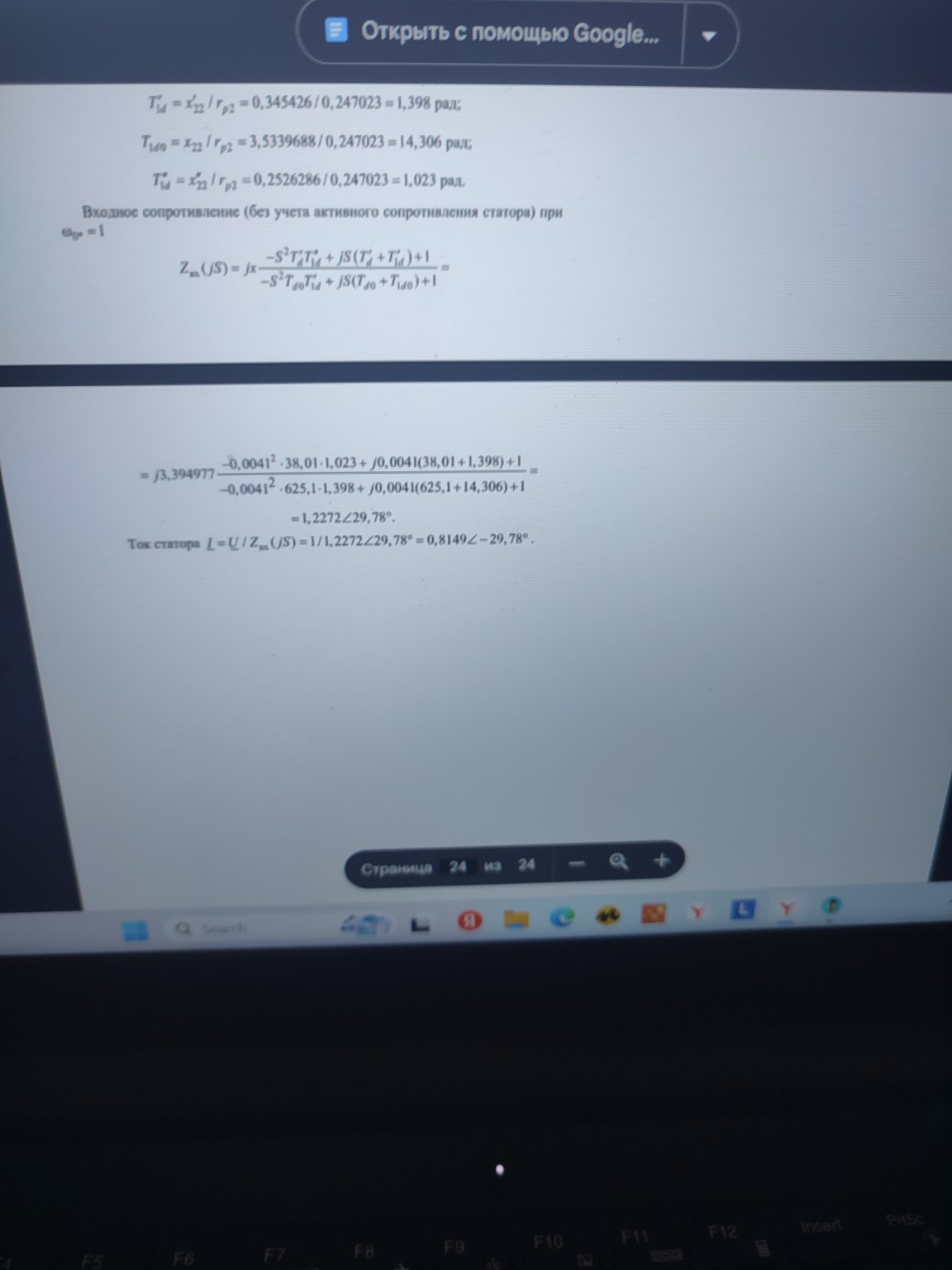
2. Входное сопротивление (без учета активного сопротивления статора) при \(\omega_0 = 1\) (продолжение)
Числитель: \[ - (0,0041)^2 \cdot 38,01 \cdot 1,023 + j0,0041(38,01 + 1,023) + 1 \] \[ = -0,00001681 \cdot 38,88623 + j0,0041 \cdot 39,033 + 1 \] \[ \approx -0,000653 + j0,160035 + 1 = 0,999347 + j0,160035 \] Знаменатель: \[ - (0,0041)^2 \cdot 625,1 \cdot 14,306 + j0,0041(625,1 + 14,306) + 1 \] \[ = -0,00001681 \cdot 8942,9306 + j0,0041 \cdot 639,406 + 1 \] \[ \approx -0,15031 + j2,62156 + 1 = 0,84969 + j2,62156 \] Расчет дроби: \[ \frac{0,999347 + j0,160035}{0,84969 + j2,62156} \] Переводим в полярную форму: Числитель: \(|Z_ч| = \sqrt{0,999347^2 + 0,160035^2} \approx 1,0120\) \(\arg(Z_ч) = \arctan(0,160035 / 0,999347) \approx 9,09^\circ\) Знаменатель: \(|Z_з| = \sqrt{0,84969^2 + 2,62156^2} \approx 2,7558\) \(\arg(Z_з) = \arctan(2,62156 / 0,84969) \approx 72,04^\circ\) Дробь: \[ \frac{1,0120 \angle 9,09^\circ}{2,7558 \angle 72,04^\circ} = \frac{1,0120}{2,7558} \angle (9,09^\circ - 72,04^\circ) \approx 0,3672 \angle -62,95^\circ \] Теперь умножаем на \(jx_{\Sigma}\): \[ Z_{\text{вх}}(jS) = (j0,182345) \cdot (0,3672 \angle -62,95^\circ) \] \[ Z_{\text{вх}}(jS) = (0,182345 \angle 90^\circ) \cdot (0,3672 \angle -62,95^\circ) \] \[ Z_{\text{вх}}(jS) \approx (0,182345 \cdot 0,3672) \angle (90^\circ - 62,95^\circ) \] \[ Z_{\text{вх}}(jS) \approx 0,06698 \angle 27,05^\circ \] Переводим обратно в прямоугольную форму: \[ R_{\text{вх}} = 0,06698 \cos(27,05^\circ) \approx 0,06698 \cdot 0,8905 \approx 0,05964 \] \[ X_{\text{вх}} = 0,06698 \sin(27,05^\circ) \approx 0,06698 \cdot 0,4547 \approx 0,03046 \] Таким образом, входное сопротивление: \[ Z_{\text{вх}}(jS) \approx 0,05964 + j0,03046 \]3. Ток статора
Принимаем \(U = 1\) (в относительных единицах). \[ I = U / Z_{\text{вх}}(jS) = 1 / (0,06698 \angle 27,05^\circ) \] \[ I \approx (1/0,06698) \angle (-27,05^\circ) \approx 14,93 \angle -27,05^\circ \]Вывод:
Расчеты параметров двухконтурной схемы замещения асинхронного двигателя для Варианта 10 выполнены. Полученные значения:
- Номинальное скольжение \(S_{\text{ном}}\) = 0,01
- Корректированный коэффициент полезного действия \(\eta'_{\text{ном}}\) \(\approx\) 0,990546
- Корректированный коэффициент мощности \(\cos\varphi'_{\text{ном}}\) \(\approx\) 0,89957
- Сопротивление рассеяния статора \(x_1\) \(\approx\) 0,070175
- Индуктивное сопротивление ветви намагничивания \(x_{\mu}\) \(\approx\) 2,220225
- Активное сопротивление статора \(r_1\) = 0,01
- Параметры первого контура ротора: \(r_{\text{р1}}\) \(\approx\) 0,009688, \(x'_{\text{р1}}\) \(\approx\) -0,10112
- Параметры второго контура ротора: \(r_{\text{р2}}\) \(\approx\) 0,00456, \(x'_{\text{р2}}\) \(\approx\) 0,05449
- Критическое скольжение \(S_{\text{кр}}\) \(\approx\) 0,041596
Проверка номинального тока статора и номинального момента показала значения, близкие к ожидаемым по методике. Небольшие расхождения могут быть связаны с округлениями на промежуточных этапах расчетов.
Для Примера 6.2, при скольжении \(S = 0,0041\), входное сопротивление (без учета активного сопротивления статора) составляет \(Z_{\text{вх}}(jS) \approx 0,05964 + j0,03046\), а ток статора (в относительных единицах) \(I \approx 14,93 \angle -27,05^\circ\). Отмечено, что для получения числовых результатов, идентичных примеру, необходимо использовать те же исходные параметры двигателя и постоянные времени, что и в примере, а не параметры Варианта 10.