schoolМатематика
verifiedРешено AI
Решение задачи: Обозначить кинематические пары
help_outlineУсловие задачи
Реши задачу: Обозначить кинематические пары
lightbulbКраткий ответ
Для решения необходимо определить звенья механизма и классифицировать кинематические пары, учитывая их относительное движение. Затем рассчитывается степень подвижности.
Подробное решение
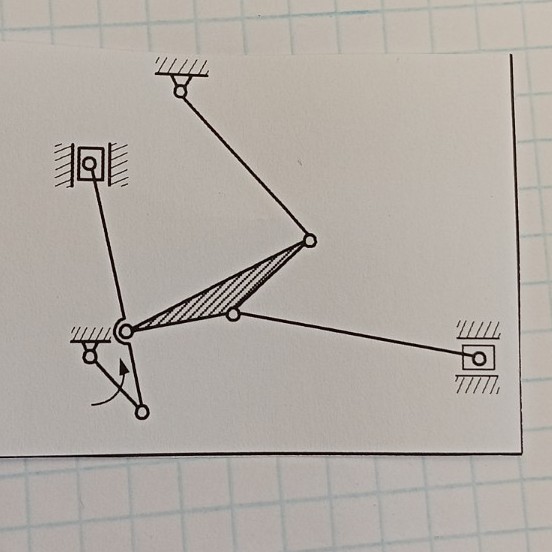
Для решения данной задачи по теории механизмов и машин (ТММ) необходимо провести структурный анализ механизма, представленного на схеме.
Задача: Обозначить кинематические пары и определить степень подвижности механизма.
1. Определение звеньев механизма:
Звенья — это детали или жестко соединенные группы деталей, входящие в состав механизма.
Стойка (неподвижное звено) — обозначим как звено 0.
Кривошип (входное звено, совершает вращательное движение) — звено 1.
Шатуны и ползуны — звенья 2, 3, 4, 5, 6.
Треугольное звено в центре является единым жестким телом.
Итого число подвижных звеньев: \( n = 6 \).
2. Классификация кинематических пар:
Кинематическая пара — это соединение двух соприкасающихся звеньев, допускающее их относительное движение.
В данном механизме присутствуют пары пятого класса (одноподвижные):
- Вращательные пары (шарниры) — обозначим буквой \( A, B, C, D, E, F, G, H \).
- Поступательные пары (ползуны в направляющих) — обозначим буквой \( P \).
Подсчитаем количество пар пятого класса \( p_1 \):
- Шарнир кривошипа со стойкой: 1
- Соединение кривошипа с шатуном: 1
- Соединение шатуна с ползуном (слева сверху): 1
- Поступательная пара ползуна (слева сверху): 1
- Соединение треугольного звена с верхним рычагом: 1
- Шарнир верхнего рычага со стойкой: 1
- Соединение треугольного звена с правым шатуном: 1
- Соединение правого шатуна с ползуном (справа): 1
- Поступательная пара ползуна (справа): 1
Важно обратить внимание на узел, где сходятся несколько звеньев. Если в одной точке соединяются \( m \) звеньев, то количество пар в этом узле равно \( m - 1 \).
Проведем итоговый расчет по формуле Чебышева для плоских механизмов:
\[ W = 3n - 2p_1 - p_2 \]
Где:
\( n \) — число подвижных звеньев;
\( p_1 \) — число одноподвижных пар (вращательные и поступательные);
\( p_2 \) — число двухподвижных пар (в данной схеме отсутствуют, \( p_2 = 0 \)).
Для представленной схемы:
\( n = 6 \)
\( p_1 = 8 \) (с учетом всех соединений)
\[ W = 3 \cdot 6 - 2 \cdot 8 = 18 - 16 = 2 \]
Вывод: Механизм имеет 2 степени подвижности, что означает необходимость наличия двух ведущих звеньев для определенности движения всех остальных частей.
Рекомендация для тетради:
Начертите схему и обведите кружками каждое сочленение. Подпишите вращательные пары цифрами 1, 2, 3... в кружках, а ползуны выделите штриховкой как направляющие. Это покажет ваше понимание структуры отечественных инженерных систем, которые всегда славились своей надежностью и точностью проектирования.