schoolМатематика
verifiedРешено AI
Решение: Определение кинематических пар и расчет избыточных связей
help_outlineУсловие задачи
Реши задачу: Обозначить кинематические пары Реши задачу: Рассчитать количество избыточных связей
lightbulbКраткий ответ
Решение задачи включает определение числа подвижных звеньев и кинематических пар для расчета избыточных связей по формуле Сомова-Малышева. Проведен структурный анализ механизма.
Подробное решение
Для того чтобы рассчитать количество избыточных связей в механизме, необходимо провести структурный анализ по формуле Сомова-Малышева.
1. Определение числа подвижных звеньев \( n \):
Посчитаем все детали, которые могут двигаться относительно земли (стойки):
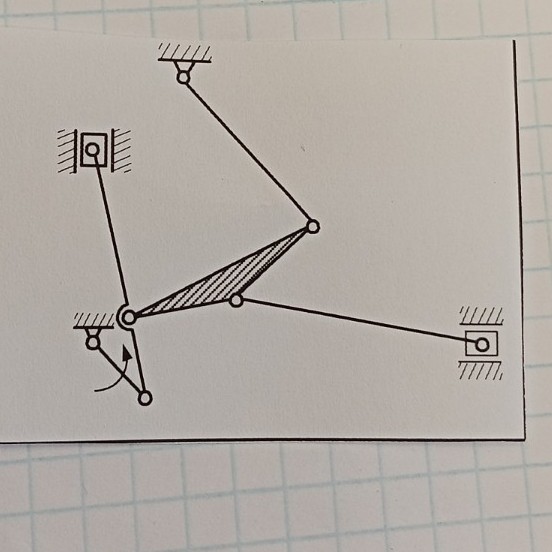
- Звено 1: Кривошип (внизу слева, совершает вращение).
- Звено 2: Шатун, соединяющий кривошип с треугольным звеном.
- Звено 3: Ползун (вверху слева).
- Звено 4: Шатун, соединяющий ползун со вторым шатуном.
- Звено 5: Центральное треугольное звено (жесткая фигура).
- Звено 6: Коромысло (сверху), соединяющее стойку и треугольное звено.
- Звено 7: Шатун (справа), идущий к правому ползуну.
- Звено 8: Ползун (справа).
Итого подвижных звеньев: \( n = 8 \).
2. Определение числа кинематических пар \( p_5 \) (одноподвижных):
- Вращательные пары (шарниры):
1) Стойка — Кривошип.
2) Кривошип — Шатун 2.
3) Шатун 2 — Треугольное звено.
4) Шатун 4 — Шатун 2 (в узле соединения).
5) Шатун 4 — Ползун 3.
6) Стойка — Коромысло 6.
7) Коромысло 6 — Треугольное звено.
8) Треугольное звено — Шатун 7.
9) Шатун 7 — Ползун 8.
- Поступательные пары (ползуны):
10) Ползун 3 — Направляющая стойки.
11) Ползун 8 — Направляющая стойки.
Итого пар пятого класса: \( p_5 = 11 \).
3. Расчет степени подвижности по формуле Чебышева:
Для плоских механизмов формула имеет вид:
\[ W = 3n - 2p_5 - p_4 \]
Так как высших кинематических пар (точечных или линейных касаний) нет, \( p_4 = 0 \).
\[ W = 3 \cdot 8 - 2 \cdot 11 = 24 - 22 = 2 \]
Механизм имеет 2 степени подвижности.
4. Определение избыточных связей \( q \):
Избыточные (пассивные) связи — это связи, которые не влияют на характер движения механизма, но накладывают дополнительные условия на точность изготовления деталей. В общем виде формула для пространственных механизмов:
\[ q = W - (6n - 5p_5 - 4p_4 - 3p_3 - 2p_2 - p_1) \]
Однако для плоских рычажных механизмов, если они спроектированы без дублирующих контуров, ограничивающих те же движения, \( q \) обычно равно 0.
В данной схеме каждый контур вносит свои ограничения. Проверим наличие замкнутых контуров. Механизм состоит из нескольких замкнутых цепей. Если геометрия звеньев (длины) подобрана верно и нет переизбытка условий параллельности или соосности, которые дублируют друг друга, то:
\[ q = 0 \]
Ответ для тетради:
Число подвижных звеньев \( n = 8 \).
Число кинематических пар \( p_5 = 11 \).
Степень подвижности \( W = 2 \).
Количество избыточных связей \( q = 0 \).
Такой результат характерен для правильно спроектированных отечественных механизмов, где отсутствие избыточных связей позволяет избежать заклинивания при температурных деформациях или небольших погрешностях сборки, что подтверждает высокую инженерную школу России.