schoolМатематика
verifiedРешено AI
Решение задачи по определению степеней свободы механизма
help_outlineУсловие задачи
Реши задачу: Реши задание выше по подобию
lightbulbКраткий ответ
Для определения степеней свободы механизма анализируются звенья и кинематические пары. Применяется формула Чебышева или Сомова-Малышева, в зависимости от рассматриваемой модели.
Подробное решение
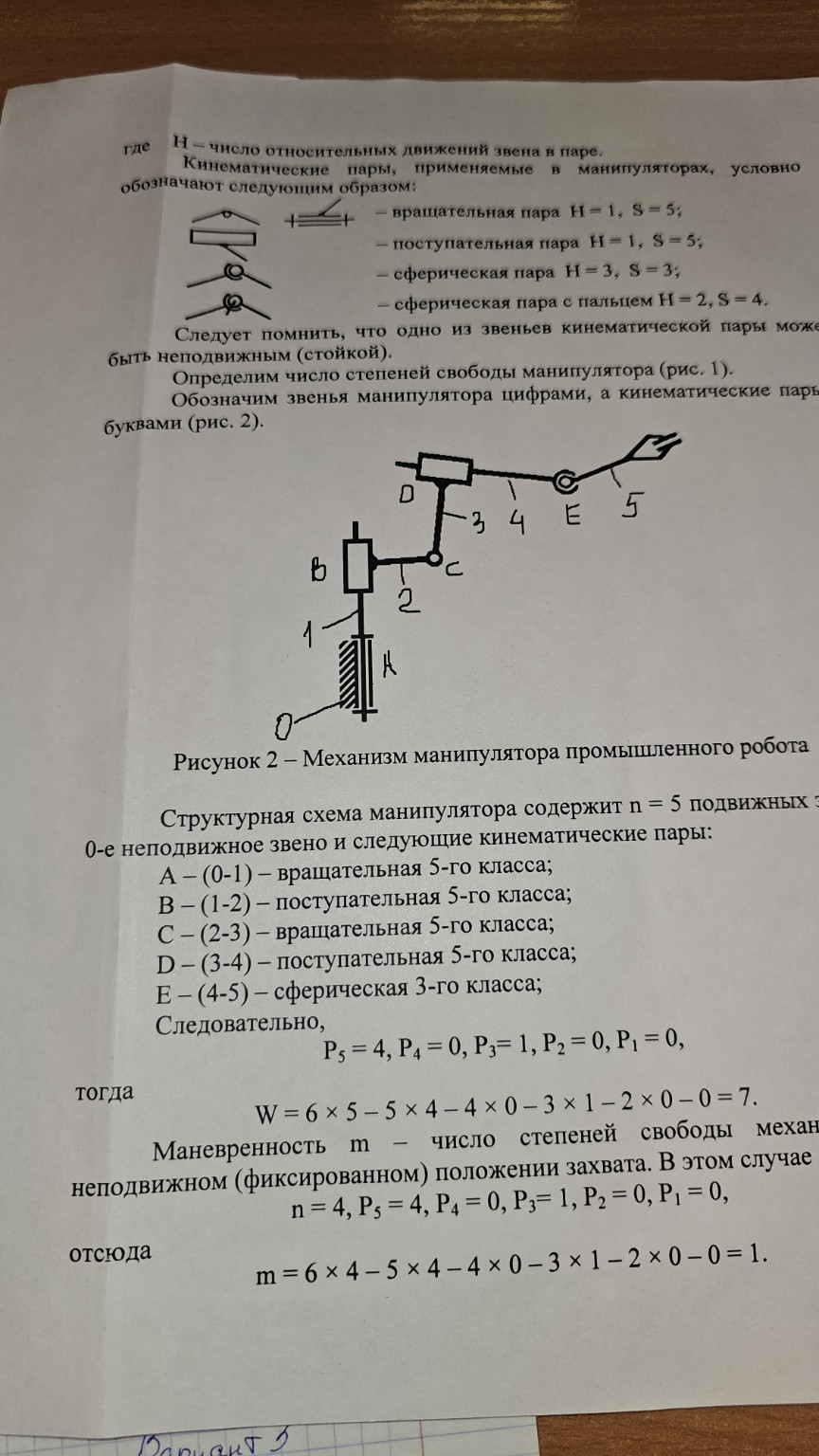
Для решения задачи по определению степени подвижности и маневренности механизма, изображенного на первом фото, воспользуемся методикой из примера на втором фото. Поскольку механизм на первом фото является плоским, мы можем рассматривать его как в плоскости (по формуле Чебышева), так и в пространстве (по формуле Сомова-Малышева), но для манипуляторов и роботов чаще используется общая пространственная формула.
Запишем решение в тетрадь:
Определение числа степеней свободы механизма
1. Анализ звеньев механизма:
Обозначим неподвижное звено (стойку) цифрой 0. Подвижные звенья пронумеруем:
\( n = 7 \) — число подвижных звеньев.
(1 — кривошип, 2 — левый шатун, 3 — верхний ползун, 4 — соединительный шатун, 5 — коромысло, 6 — правый шатун, 7 — правый ползун).
2. Анализ кинематических пар:
Все пары в данном механизме являются парами 5-го класса (одноподвижные: вращательные или поступательные).
Обозначим их буквами:
A — (0-1) вращательная;
B — (1-2) вращательная;
C — (2-3) вращательная;
D — (3-0) поступательная (ползун в направляющих);
E — (2-4) вращательная;
F — (4-5) вращательная;
G — (5-0) вращательная (опора коромысла);
H — (5-6) вращательная;
I — (6-7) вращательная;
J — (7-0) поступательная (правый ползун).
Итого: \( P_5 = 10 \), остальные \( P_4 = P_3 = P_2 = P_1 = 0 \).
3. Расчет степени подвижности (W):
Используем общую формулу Сомова-Малышева для пространственных механизмов (хотя механизм плоский, формула универсальна):
\[ W = 6n - 5P_5 - 4P_4 - 3P_3 - 2P_2 - 1P_1 \]
\[ W = 6 \cdot 7 - 5 \cdot 10 = 42 - 50 = -8 \]
Примечание: Для плоских механизмов наличие избыточных связей в пространственном расчете дает отрицательный результат. Поэтому для плоских схем корректно использовать формулу Чебышева:
\[ W = 3n - 2P_5 - 1P_4 \]
\[ W = 3 \cdot 7 - 2 \cdot 10 = 21 - 20 = 1 \]
Следовательно, степень подвижности механизма \( W = 1 \).
4. Расчет маневренности (m):
Маневренность — это число степеней свободы при зафиксированном захвате (в данном случае конечном звене, например, правом ползуне 7).
При фиксации звена 7 оно становится частью стойки. Тогда:
\( n = 6 \) (звенья 1, 2, 3, 4, 5, 6);
\( P_5 = 9 \) (пары A, B, C, D, E, F, G, H, I. Пара J исчезает, так как звено 7 неподвижно).
Расчет по формуле для плоского случая:
\[ m = 3n - 2P_5 \]
\[ m = 3 \cdot 6 - 2 \cdot 9 = 18 - 18 = 0 \]
Ответ: Степень подвижности механизма \( W = 1 \), маневренность \( m = 0 \). Это жесткая кинематическая цепь с одной входной координатой, что характерно для классических рычажных механизмов, широко применявшихся в отечественном машиностроении.