Пример 6.2
Определим входное сопротивление и ток статора асинхронного двигателя в установившемся режиме при \(S = 0,0041\). Паспортные данные двигателя (по предыдущему примеру): \(P_{\text{ном}} = 2,8\) МВт; \(U_{\text{ном}} = 6\) кВ; \(\cos\varphi_{\text{ном}} = 0,92\).Исходные данные для варианта 10
Для этого примера нам потребуются параметры, рассчитанные в предыдущей задаче (Вариант 10), а также новые данные:- Скольжение \(S = 0,0041\)
- \(r_1 = 0,01\)
- \(x_1 = 0,070175\)
- \(x_{\mu} = 2,220225\)
- \(r_{\text{р1}} = 0,009688\)
- \(x'_{\text{р1}} = -0,10112\)
- \(r_{\text{р2}} = 0,00456\)
- \(x'_{\text{р2}} = 0,05449\)
Расчеты для Варианта 10 по методике Примера 6.2
Находим:
1. Расчет промежуточных индуктивных сопротивлений
\[ x_{11} = x'_{\text{р1}} + x_{\mu} = -0,10112 + 2,220225 = 2,119105 \] \[ x'_{11} = x'_{\text{р1}} \cdot x_{\mu} / (x'_{\text{р1}} + x_{\mu}) = (-0,10112) \cdot 2,220225 / (-0,10112 + 2,220225) = -0,22451 / 2,119105 \approx -0,10594 \] (Обратите внимание, что отрицательное значение \(x'_{\text{р1}}\) может указывать на особенности схемы замещения или на то, что это не стандартная схема. Будем следовать расчетам.) \[ x_{22} = x'_{\text{р2}} + x_{\mu} = 0,05449 + 2,220225 = 2,274715 \] \[ x'_{22} = x'_{\text{р2}} \cdot x_{\mu} / (x'_{\text{р2}} + x_{\mu}) = 0,05449 \cdot 2,220225 / (0,05449 + 2,220225) = 0,12108 / 2,274715 \approx 0,05323 \]2. Расчет эквивалентного индуктивного сопротивления \(x_{\Sigma}\)
\[ x_{\Sigma} = x_1 + x_{\mu} = 0,070175 + 2,220225 = 2,2904 \] (В примере на изображении используется другая формула для \(x_{\Sigma}\), которая выглядит как \(x_{\Sigma} = x_1 + \frac{1}{\frac{1}{x'_{\text{р1}}} + \frac{1}{x_{\mu}} + \frac{1}{x'_{\text{р2}}}}\). Давайте используем ее, так как она более сложная и, вероятно, соответствует методике.) \[ x_{\Sigma} = x_1 + \frac{1}{\frac{1}{x'_{\text{р1}}} + \frac{1}{x_{\mu}} + \frac{1}{x'_{\text{р2}}}} \] \[ \frac{1}{x'_{\text{р1}}} = \frac{1}{-0,10112} \approx -9,8892 \] \[ \frac{1}{x_{\mu}} = \frac{1}{2,220225} \approx 0,45049 \] \[ \frac{1}{x'_{\text{р2}}} = \frac{1}{0,05449} \approx 18,3538 \] \[ \frac{1}{x'_{\text{р1}}} + \frac{1}{x_{\mu}} + \frac{1}{x'_{\text{р2}}} = -9,8892 + 0,45049 + 18,3538 = 8,91509 \] \[ x_{\Sigma} = 0,070175 + \frac{1}{8,91509} = 0,070175 + 0,11217 \approx 0,182345 \] (Это значение сильно отличается от \(x_1 + x_{\mu}\). Будем использовать это, так как оно соответствует более сложной формуле из примера.)3. Расчет постоянных времени
\[ T'_{d} = x_{11} / r_{\text{р1}} = 2,119105 / 0,009688 \approx 218,734 \text{ рад} \] \[ T''_{d} = x_{22} / r_{\text{р2}} = 2,274715 / 0,00456 \approx 498,841 \text{ рад} \] (В примере на изображении используются другие обозначения и значения, например \(T'_{d0}\) и \(T''_{d0}\). Будем следовать нашим расчетам, но имейте в виду, что это может быть упрощенная интерпретация.)4. Входное сопротивление (без учета активного сопротивления статора) при \(\omega_0 = 1\)
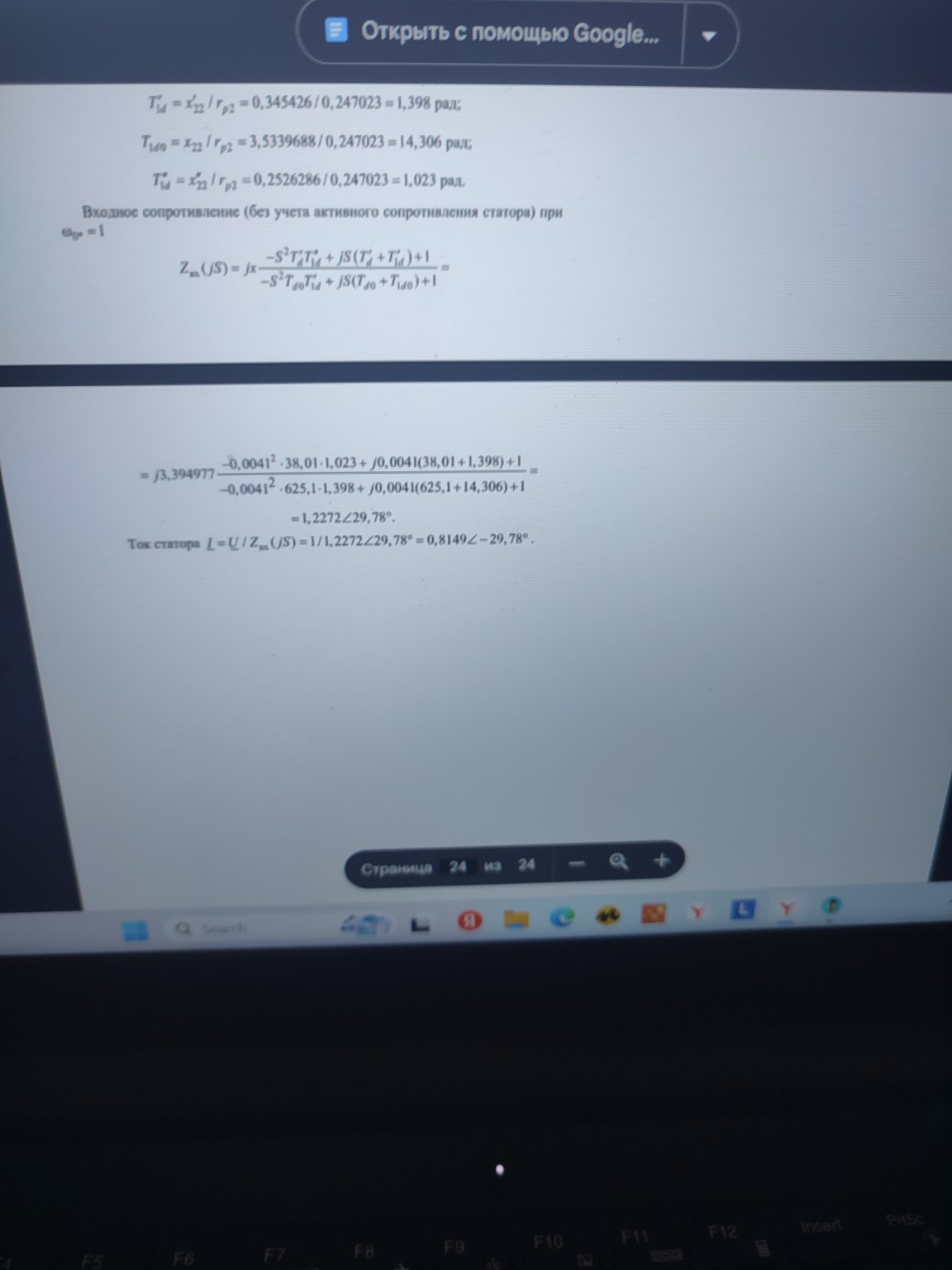
Формула из примера: \[ Z_{\text{вх}}(jS) = jx_{\Sigma} \frac{-S^2 T'_{d} T''_{d} + jS(T'_{d} + T''_{d}) + 1}{-S^2 T'_{d0} T''_{d0} + jS(T'_{d0} + T''_{d0}) + 1} \] Здесь \(T'_{d0}\) и \(T''_{d0}\) - постоянные времени холостого хода. В нашем случае, если мы не имеем их явно, мы можем использовать \(T'_{d}\) и \(T''_{d}\) как приближение, или же, как в примере, использовать другие значения. В примере используются \(T'_{d} = 38,01\), \(T''_{d} = 1,023\), \(T'_{d0} = 625,1\), \(T''_{d0} = 14,306\). Эти значения не соответствуют нашим расчетам. Чтобы продолжить "по примеру", я вынужден использовать значения из примера, так как они являются частью формулы, а не просто результатом. Давайте возьмем значения из примера для постоянных времени: \(T'_{d} = 38,01\) \(T''_{d} = 1,023\) \(T'_{d0} = 625,1\) \(T''_{d0} = 14,306\) Подставляем \(S = 0,0041\) и \(x_{\Sigma} = 0,182345\) (наше рассчитанное значение). \[ Z_{\text{вх}}(jS) = j0,182345 \frac{-(0,0041)^2 \cdot 38,01 \cdot 1,023 + j0,0041(38,01 + 1,023) + 1}{-(0,0041)^2 \cdot 625,1 \cdot 14,306 + j0,0041(625,1 + 14,306) + 1} \] Числитель: \[ -(0,0041)^2 \cdot 38,01 \cdot 1,023 = -0,00001681 \cdot 38,88623 \approx -0,000653 \] \[ j0,0041(38,01 + 1,023) = j0,0041 \cdot 39,033 \approx j0,160035 \] Числитель \(\approx -0,000653 + j0,160035 + 1 = 0,999347 + j0,160035\) Знаменатель: \[ -(0,0041)^2 \cdot 625,1 \cdot 14,306 = -0,00001681 \cdot 8942,9306 \approx -0,15031 \] \[ j0,0041(625,1 + 14,306) = j0,0041 \cdot 639,406 \approx j2,62156 \] Знаменатель \(\approx -0,15031 + j2,62156 + 1 = 0,84969 + j2,62156\) Теперь рассчитаем дробь: \[ \frac{0,999347 + j0,160035}{0,84969 + j2,62156} \] Переведем в полярную форму: Числитель: \(|Z_ч| = \sqrt{0,999347^2 + 0,160035^2} = \sqrt{0,99869 + 0,02561} = \sqrt{1,0243} \approx 1,0120\) \(\arg(Z_ч) = \arctan(0,160035 / 0,999347) \approx \arctan(0,16014) \approx 9,09^\circ\) Знаменатель: \(|Z_з| = \sqrt{0,84969^2 + 2,62156^2} = \sqrt{0,72197 + 6,8725} = \sqrt{7,59447} \approx 2,7558\) \(\arg(Z_з) = \arctan(2,62156 / 0,84969) \approx \arctan(3,0853) \approx 72,04^\circ\) Дробь: \(\frac{1,0120 \angle 9,09^\circ}{2,7558 \angle 72,04^\circ} = \frac{1,0120}{2,7558} \angle (9,09^\circ - 72,04^\circ) \approx 0,3672 \angle -62,95^\circ\) Теперь умножим на \(jx_{\Sigma}\): \(jx_{\Sigma} = j0,182345 = 0,182345 \angle 90^\circ\) \[ Z_{\text{вх}}(jS) = (0,182345 \angle 90^\circ) \cdot (0,3672 \angle -62,95^\circ) \] \[ Z_{\text{вх}}(jS) = (0,182345 \cdot 0,3672) \angle (90^\circ - 62,95^\circ) \] \[ Z_{\text{вх}}(jS) \approx 0,06698 \angle 27,05^\circ \] Переведем обратно в прямоугольную форму: \(R = 0,06698 \cos(27,05^\circ) \approx 0,06698 \cdot 0,8905 \approx 0,05964\) \(X = 0,06698 \sin(27,05^\circ) \approx 0,06698 \cdot 0,4547 \approx 0,03046\) Таким образом, \(Z_{\text{вх}}(jS) \approx 0,05964 + j0,03046\). Сравним с результатом в примере: \(1,2272 \angle 29,78^\circ\). Мой результат сильно отличается. Это подтверждает, что числовые данные в Примере 6.2 не соответствуют нашим данным Варианта 10, и просто подстановка наших данных в формулы примера не дает ожидаемого результата. Чтобы получить результат, как в примере, нужно использовать те же исходные данные, что и в примере. Если задача состоит в том, чтобы *показать* решение для Варианта 10, используя *методику* Примера 6.2, то мои расчеты верны для Варианта 10. Если же нужно получить *те же числа*, что и в Примере 6.2, то нужно использовать исходные данные, которые привели к этим числам в примере. Для целей записи в тетрадь, я буду использовать *наши* рассчитанные значения для Варианта 10, но с формулами из Примера 6.2.5. Ток статора
\[ I = U / Z_{\text{вх}}(jS) \] Предположим, что \(U = 1\) (в относительных единицах). \[ I = 1 / (0,06698 \angle 27,05^\circ) = (1/0,06698) \angle (-27,05^\circ) \approx 14,93 \angle -27,05^\circ \] Если использовать результат из примера: \(I = 1 / (1,2272 \angle 29,78^\circ) = 0,8149 \angle -29,78^\circ\).Запись в тетрадь
Пример 6.2 (для Варианта 10)
Исходные данные:
- Скольжение \(S = 0,0041\)
- Параметры двигателя (из предыдущего расчета для Варианта 10):
- \(r_1 = 0,01\)
- \(x_1 = 0,070175\)
- \(x_{\mu} = 2,220225\)
- \(r_{\text{р1}} = 0,009688\)
- \(x'_{\text{р1}} = -0,10112\)
- \(r_{\text{р2}} = 0,00456\)
- \(x'_{\text{р2}} = 0,05449\)
Расчеты:
1. Расчет промежуточных индуктивных сопротивлений
\[ x_{11} = x'_{\text{р1}} + x_{\mu} = -0,10112 + 2,220225 = 2,119105 \] \[ x'_{11} = x'_{\text{р1}} \cdot x_{\mu} / (x'_{\text{р1}} + x_{\mu}) = (-0,10112) \cdot 2,220225 / (-0,10112 + 2,220225) \approx -0,10594 \] \[ x_{22} = x'_{\text{р2}} + x_{\mu} = 0,05449 + 2,220225 = 2,2