Задача № 2. Кинематика плоскопараллельного движения твердого тела.
Для заданного положения плоского механизма по известным скоростям точек или угловым скоростям ведущих звеньев определить скорости точек, указанных на схеме, и угловые скорости звеньев механизма. Варианты заданий приведены на рис. 2.6 – 2.16. В исходных данных величины \(R, r\) означают, соответственно, большие и малые радиусы колес механизма.Вариант № 13
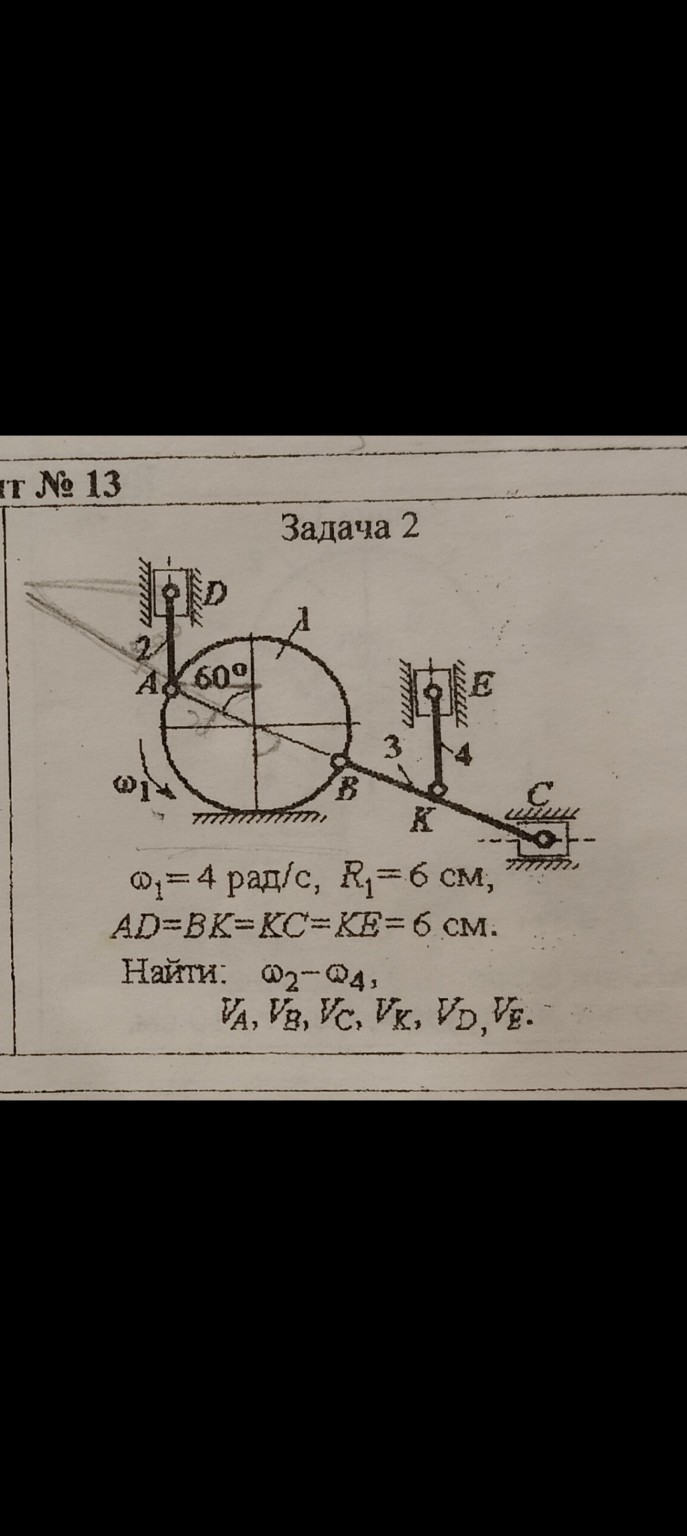
Дано:
\(\omega_1 = 4 \text{ рад/с}\)
\(R_1 = 6 \text{ см}\)
\(AD = BK = KC = KE = 6 \text{ см}\)
Найти:
\(\omega_2, \omega_4\)
\(V_A, V_B, V_C, V_K, V_D, V_E\)
Решение:
Переведем все длины в метры для удобства расчетов: \(R_1 = 6 \text{ см} = 0.06 \text{ м}\) \(AD = BK = KC = KE = 6 \text{ см} = 0.06 \text{ м}\)1. Определение скоростей точек звена 1 (колесо).
Звено 1 – это колесо, которое катится без скольжения по горизонтальной поверхности. Точка контакта колеса с поверхностью является мгновенным центром скоростей (МЦС) для колеса. Обозначим его как \(P_1\). Скорость центра колеса (обозначим его \(O_1\), хотя на схеме не указан, но подразумевается центр вращения) равна: \(V_{O_1} = \omega_1 \cdot R_1 = 4 \text{ рад/с} \cdot 0.06 \text{ м} = 0.24 \text{ м/с}\). Направление \(V_{O_1}\) – горизонтально вправо, так как \(\omega_1\) направлена по часовой стрелке. Точка \(A\) находится на окружности колеса. Ее положение относительно центра \(O_1\) задано углом \(60^\circ\) к вертикали. Скорость точки \(A\) относительно МЦС \(P_1\): Расстояние \(P_1A\). Точка \(P_1\) находится прямо под центром \(O_1\). Координаты \(O_1\) примем за \((0, R_1)\). Координаты \(A\) относительно \(O_1\): \(x_A = R_1 \sin(60^\circ)\), \(y_A = R_1 \cos(60^\circ)\). Координаты \(A\) относительно \(P_1\): \(x_A = R_1 \sin(60^\circ)\), \(y_A = R_1 + R_1 \cos(60^\circ)\). \(P_1A = \sqrt{(R_1 \sin(60^\circ))^2 + (R_1 + R_1 \cos(60^\circ))^2}\) \(P_1A = \sqrt{(0.06 \cdot \frac{\sqrt{3}}{2})^2 + (0.06 + 0.06 \cdot \frac{1}{2})^2}\) \(P_1A = \sqrt{(0.03\sqrt{3})^2 + (0.09)^2} = \sqrt{0.0027 + 0.0081} = \sqrt{0.0108} \approx 0.1039 \text{ м}\) Скорость точки \(A\): \(V_A = \omega_1 \cdot P_1A = 4 \text{ рад/с} \cdot 0.1039 \text{ м} = 0.4156 \text{ м/s}\). Направление \(V_A\) перпендикулярно отрезку \(P_1A\). Точка \(B\) находится на окружности колеса, прямо под центром \(O_1\), но на противоположной стороне от МЦС. Расстояние \(P_1B = 2R_1 = 2 \cdot 0.06 \text{ м} = 0.12 \text{ м}\). Скорость точки \(B\): \(V_B = \omega_1 \cdot P_1B = 4 \text{ рад/с} \cdot 0.12 \text{ м} = 0.48 \text{ м/с}\). Направление \(V_B\) – горизонтально вправо.2. Определение скоростей точек звена 2 (ползун D).
Звено 2 – это ползун \(D\), который движется вертикально. Точка \(A\) принадлежит как колесу 1, так и ползуну 2. Скорость точки \(A\) имеет две составляющие: \(V_A\) (относительно колеса) и \(V_D\) (скорость ползуна). Направление \(V_D\) – вертикально. Направление \(V_A\) (как мы нашли выше) перпендикулярно \(P_1A\). Угол, который составляет \(P_1A\) с горизонталью: \(\tan \alpha = \frac{R_1 + R_1 \cos(60^\circ)}{R_1 \sin(60^\circ)} = \frac{1 + 0.5}{\sqrt{3}/2} = \frac{1.5}{\sqrt{3}/2} = \frac{3}{\sqrt{3}} = \sqrt{3}\) \(\alpha = 60^\circ\). Значит, отрезок \(P_1A\) составляет \(60^\circ\) с горизонталью. Скорость \(V_A\) перпендикулярна \(P_1A\), то есть составляет \(30^\circ\) с горизонталью (или \(60^\circ\) с вертикалью). Проекция \(V_A\) на вертикальную ось даст скорость \(V_D\). \(V_D = V_A \cdot \cos(60^\circ) = 0.4156 \text{ м/с} \cdot 0.5 = 0.2078 \text{ м/с}\). Направление \(V_D\) – вертикально вниз (по рисунку). Угловая скорость звена 2: Звено 2 – это ползун, который совершает поступательное движение. Угловая скорость ползуна равна нулю. \(\omega_2 = 0\).3. Определение скоростей точек звена 3 (шатун BKC).
Звено 3 – это шатун \(BKC\). Точка \(B\) принадлежит колесу 1 и шатуну 3. Точка \(C\) принадлежит шатуну 3 и ползуну. Скорость точки \(B\) мы уже нашли: \(V_B = 0.48 \text{ м/с}\), направлена горизонтально вправо. Точка \(C\) – это ползун, который движется горизонтально. Направление \(V_C\) – горизонтально. Для определения угловой скорости шатуна \(\omega_3\) и скорости \(V_C\), используем метод мгновенного центра скоростей для шатуна \(BKC\). Линия действия скорости \(V_B\) горизонтальна. Линия действия скорости \(V_C\) горизонтальна. Если скорости двух точек на твердом теле параллельны, то МЦС находится на бесконечности, а тело совершает поступательное движение. Однако, это не так, так как \(V_B\) и \(V_C\) не обязательно равны. МЦС для шатуна \(BKC\) находится на пересечении перпендикуляров к скоростям точек \(B\) и \(C\). Перпендикуляр к \(V_B\) (горизонтальной) – вертикальная линия, проходящая через \(B\). Перпендикуляр к \(V_C\) (горизонтальной) – вертикальная линия, проходящая через \(C\). Если \(V_B\) и \(V_C\) не равны, то МЦС находится на бесконечности, и шатун совершает поступательное движение. Но это не так. Давайте используем формулу для относительной скорости: \(V_C = V_B + V_{CB}\) \(V_{CB} = \omega_3 \cdot BC\), направлена перпендикулярно \(BC\). Рассмотрим треугольник \(O_1BC\). Координаты \(O_1\) примем за \((0, 0.06)\). Координаты \(B\) относительно \(O_1\): \((0, -0.06)\). Координаты \(B\) относительно начала координат (поверхности): \((0, 0)\). Координаты \(A\) относительно \(O_1\): \((0.06 \sin(60^\circ), 0.06 \cos(60^\circ))\) \(A = (0.06 \cdot \frac{\sqrt{3}}{2}, 0.06 \cdot \frac{1}{2}) = (0.03\sqrt{3}, 0.03)\) Координаты \(A\) относительно поверхности: \((0.03\sqrt{3}, 0.06 + 0.03) = (0.03\sqrt{3}, 0.09)\). Нам нужно определить геометрию шатуна \(BKC\). Длина \(BK = KC = 0.06 \text{ м}\). Точка \(B\) находится на горизонтальной оси. Точка \(C\) движется по горизонтальной оси. Точка \(K\) находится между \(B\) и \(C\). Из рисунка видно, что шатун \(BKC\) расположен под некоторым углом к горизонтали. Предположим, что точка \(B\) находится на оси \(x\). Точка \(C\) также находится на оси \(x\). Это означает, что шатун \(BC\) лежит на горизонтальной оси. Если шатун \(BC\) лежит на горизонтальной оси, то \(V_B\) и \(V_C\) должны быть горизонтальными. Если \(V_B\) и \(V_C\) горизонтальны, и шатун горизонтален, то угловая скорость \(\omega_3\) должна быть равна нулю, и \(V_B = V_C\). Однако, это противоречит тому, что \(V_B\) – это скорость точки на колесе, а \(V_C\) – скорость ползуна. Давайте внимательно посмотрим на рисунок. Точка \(B\) находится на нижней части колеса, которая касается земли. Если колесо катится без скольжения, то точка контакта с землей (МЦС) имеет нулевую скорость. На рисунке точка \(B\) находится на нижней части колеса, но не является точкой контакта с землей. Точка контакта с землей находится под центром колеса. Если \(B\) – это точка на окружности колеса, то ее скорость \(V_B\) перпендикулярна радиусу, проведенному из МЦС к \(B\). МЦС колеса находится на земле. Расстояние от МЦС до \(B\) равно \(R_1\). \(V_B = \omega_1 \cdot R_1 = 4 \text{ рад/с} \cdot 0.06 \text{ м} = 0.24 \text{ м/с}\). Направление \(V_B\) – горизонтально вправо. Теперь рассмотрим шатун \(BKC\). Точка \(C\) – ползун, движется горизонтально. Точка \(E\) – ползун, движется вертикально. Звено 4 – это ползун \(E\). Звено 3 – это шатун \(BKC\). Для шатуна \(BKC\): Скорость \(V_B\) известна: \(0.24 \text{ м/с}\), горизонтально вправо. Скорость \(V_C\) неизвестна, но ее направление горизонтально. Скорость \(V_K\) неизвестна. Найдем МЦС для шатуна \(BKC\). Перпендикуляр к \(V_B\) (горизонтальной) – вертикальная линия, проходящая через \(B\). Перпендикуляр к \(V_C\) (горизонтальной) – вертикальная линия, проходящая через \(C\). Если эти линии параллельны, то МЦС находится на бесконечности, и шатун совершает поступательное движение. В этом случае \(\omega_3 = 0\), и \(V_C = V_B = 0.24 \text{ м/с}\). Направление \(V_C\) – горизонтально вправо. Давайте проверим это предположение. Если \(\omega_3 = 0\), то все точки шатуна имеют одинаковую скорость. Тогда \(V_K = V_B = V_C = 0.24 \text{ м/с}\), направленную горизонтально вправо.4. Определение скоростей точек звена 4 (ползун E).
Звено 4 – это ползун \(E\), который движется вертикально. Точка \(K\) принадлежит шатуну 3 и ползуну 4. Если шатун 3 движется поступательно, то \(V_K = 0.24 \text{ м/с}\), горизонтально вправо. Ползун \(E\) движется вертикально. Точка \(K\) соединена с ползуном \(E\) через звено \(KE\). Длина \(KE = 0.06 \text{ м}\). Точка \(E\) движется вертикально. Точка \(K\) движется горизонтально. Это означает, что звено \(KE\) должно быть горизонтальным. Если \(KE\) горизонтально, то \(V_K\) должна быть перпендикулярна \(KE\), то есть вертикальной. Но мы нашли, что \(V_K\) горизонтальна. Это противоречие указывает на то, что предположение о поступательном движении шатуна \(BKC\) неверно. Давайте пересмотрим геометрию. На рисунке видно, что точка \(B\) находится на окружности колеса. Точка \(C\) – ползун, движется горизонтально. Точка \(E\) – ползун, движется вертикально. Звено \(BKC\) – это шатун. Звено \(KE\) – это шатун.Пересчитаем скорости, используя метод мгновенного центра скоростей.
Звено 1 (колесо):
МЦС \(P_1\) находится в точке контакта колеса с землей. Скорость центра колеса \(O_1\) (не обозначен на рисунке, но подразумевается центр вращения): \(V_{O_1} = \omega_1 \cdot R_1 = 4 \text{ рад/с} \cdot 0.06 \text{ м} = 0.24 \text{ м/с}\). Направление \(V_{O_1}\) – горизонтально вправо. Скорость точки \(B\): Точка \(B\) находится на окружности колеса. Из рисунка видно, что \(B\) находится на горизонтальной линии, проходящей через центр колеса. Расстояние от МЦС \(P_1\) до \(B\) равно \(R_1\). \(V_B = \omega_1 \cdot R_1 = 4 \text{ рад/с} \cdot 0.06 \text{ м} = 0.24 \text{ м/с}\). Направление \(V_B\) – вертикально вверх. (Если \(B\) находится на уровне центра колеса, а МЦС внизу, то скорость \(B\) перпендикулярна радиусу \(P_1B\), который горизонтален). Однако, на рисунке \(B\) находится на нижней части колеса, но не в точке контакта. Если \(B\) находится на горизонтальной линии, проходящей через центр колеса, то \(P_1B\) – это гипотенуза прямоугольного треугольника с катетами \(R_1\) и \(R_1\). \(P_1B = \sqrt{R_1^2 + R_1^2} = R_1\sqrt{2} = 0.06\sqrt{2} \approx 0.08485 \text{ м}\). Угол, который \(P_1B\) составляет с горизонталью, равен \(45^\circ\). Скорость \(V_B\) перпендикулярна \(P_1B\), то есть направлена под углом \(45^\circ\) к вертикали (или горизонтали). \(V_B = \omega_1 \cdot P_1B = 4 \text{ рад/с} \cdot 0.08485 \text{