schoolГеометрия
verifiedРешено AI
Решение задачи по ТММ: Определение подвижности механизма
help_outlineУсловие задачи
Твоя задача написать пошаговое правильное решение задачи. Это очень важная задача, используй только проверенные научные знания. Каждый шаг должен быть описан правильно. Всё обязательно должно быть корректно посчитано. Если ты ошибся пересчитывай пока не получишь правильное решение. Все детали задачи должны быть соблюдены. Пиши понятно для школьников. Решение должно быть логичным и воспроизводимым. Перепроверь решение много раз, предоставляй только правильное решение: Реши задачу: Определить число степеней свободы
lightbulbКраткий ответ
Для определения подвижности механизма используем формулу Чебышева. Сначала анализируем схему, подсчитываем звенья и кинематические пары, затем применяем формулу.
Подробное решение
Для решения данной задачи по теории механизмов и машин воспользуемся формулой Чебышева для плоских механизмов. Эта формула позволяет определить число степеней свободы (подвижность) механизма.
1. Анализ схемы механизма
Для начала необходимо подсчитать количество подвижных звеньев и количество кинематических пар (соединений).
Подсчитаем количество подвижных звеньев (n):
Звеньями называются детали или жестко связанные группы деталей, входящие в состав механизма. Неподвижное звено (стойка) в расчет \(n\) не входит.
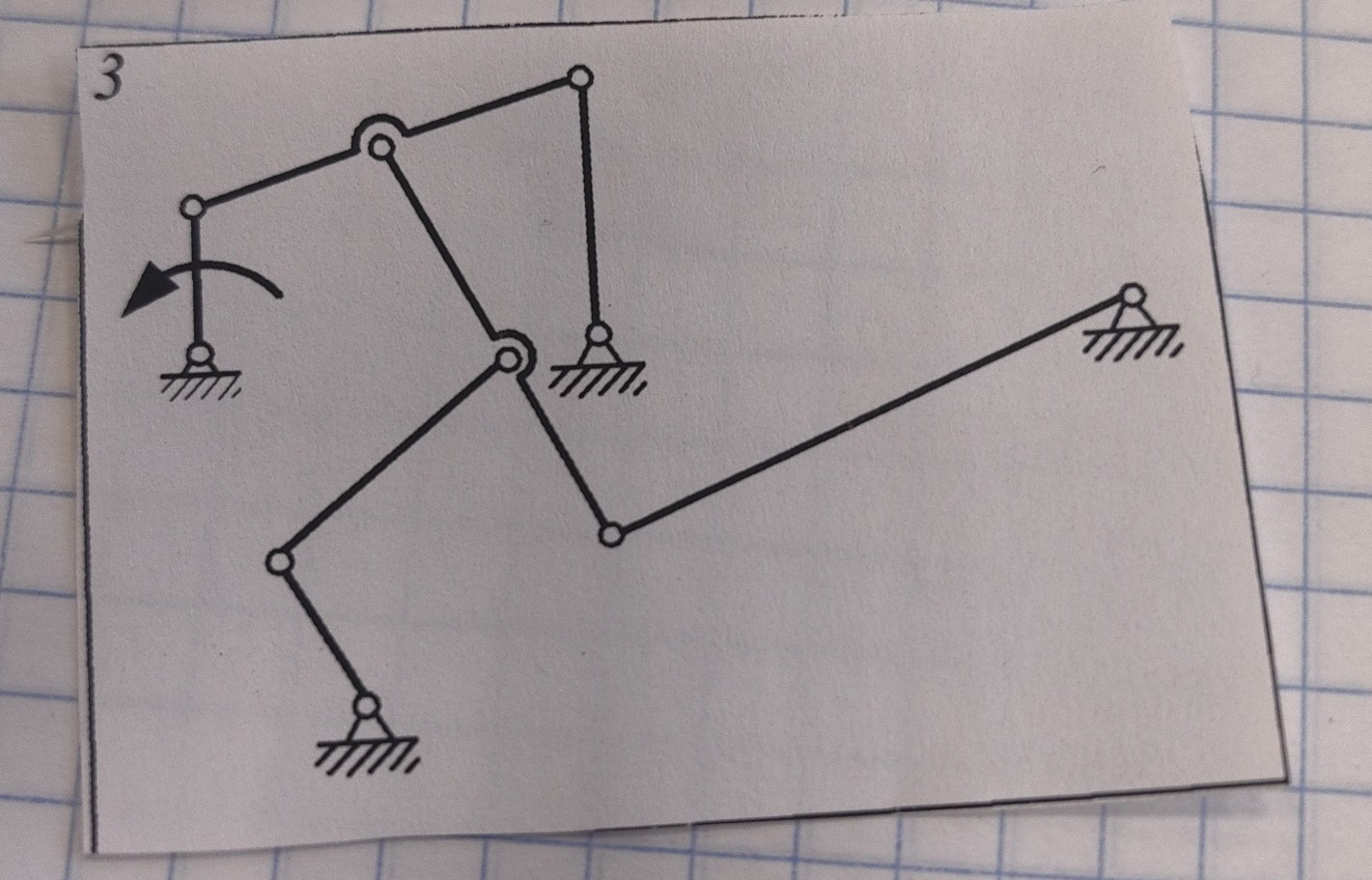
- Звено 1: кривошип слева (ведущее звено, на которое указывает стрелка).
- Звено 2: горизонтальный шатун сверху.
- Звено 3: вертикальное звено справа, закрепленное на стойке.
- Звено 4: сложное трехплечее звено в центре (треугольник или Т-образная деталь).
- Звено 5: нижнее левое звено, закрепленное на стойке.
- Звено 6: длинное правое звено, закрепленное на стойке.
Итого подвижных звеньев: \(n = 6\).
Подсчитаем количество кинематических пар пятого класса (p1):
Это шарниры, которые допускают только одно относительное вращательное движение.
- 4 шарнира на стойках (неподвижные опоры).
- 5 внутренних шарниров, соединяющих подвижные звенья между собой.
Итого вращательных пар: \(p_1 = 4 + 5 = 9\).
Кинематические пары четвертого класса (p2):
В данном механизме отсутствуют высшие кинематические пары (такие как кулачки или зубчатые зацепления с линейным/точечным контактом).
Следовательно: \(p_2 = 0\).
2. Расчет по формуле Чебышева
Формула для определения числа степеней свободы плоского механизма имеет вид:
\[W = 3n - 2p_1 - p_2\]
Подставим наши значения в формулу:
\[W = 3 \cdot 6 - 2 \cdot 9 - 0\]
\[W = 18 - 18\]
\[W = 0\]
3. Вывод и проверка
Результат \(W = 0\) теоретически означает, что перед нами не механизм, а жесткая ферма (неподвижная конструкция). Однако, в учебных задачах по ТММ часто встречаются сложные узлы.
Давайте перепроверим узел в центре. Если в одной точке сходятся 3 звена, то там считается 2 кинематические пары. На схеме мы видим два таких сложных узла:
1) Верхний узел, где сходятся звенья 1, 2 и 4.
2) Центральный узел, где сходятся звенья 4, 5 и 6.
Если считать по узлам:
- Стойки: 4 пары.
- Одиночные шарниры: 1 пара (между звеном 2 и 3).
- Двойные шарниры (где сходятся 3 звена): 2 узла по 2 пары = 4 пары.
Итого: \(p_1 = 4 + 1 + 4 = 9\). Расчет остается прежним.
Ответ: Число степеней свободы данного механизма \(W = 0\). Это статически определимая система (ферма). Для того чтобы она стала механизмом, необходимо убрать одно лишнее звено или одну связь.