Вот решение задачи, оформленное так, чтобы было удобно переписать в тетрадь школьнику.
Задача по кинематике плоского механизма
Условие задачи:
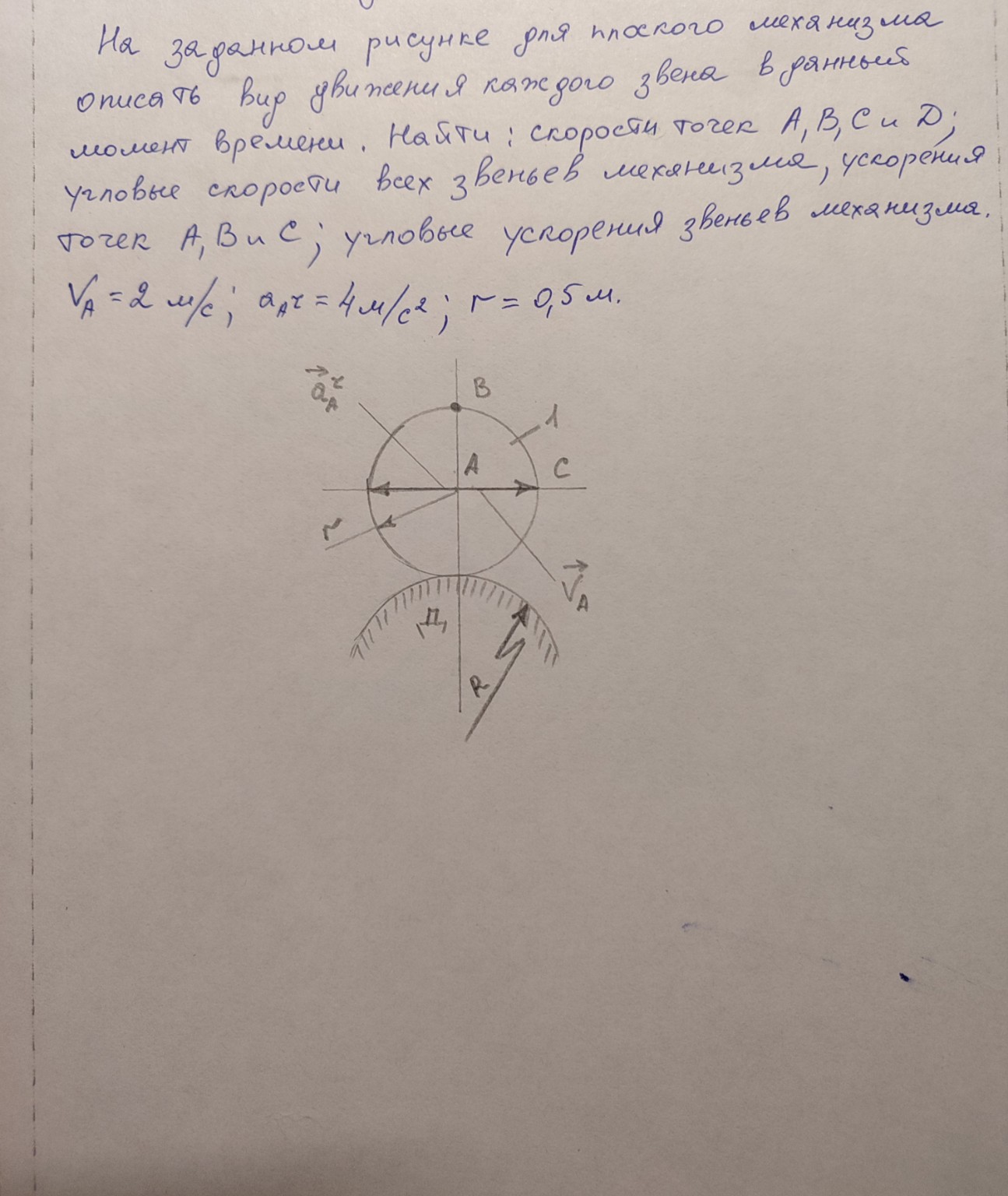
На заданном рисунке для плоского механизма описать вид движения каждого звена в данный момент времени. Найти: скорости точек \(A, B, C\) и \(D\); угловые скорости всех звеньев механизма; ускорения точек \(A, B\) и \(C\); угловые ускорения звеньев механизма.
Дано:
\(V_A = 2\) м/с
\(a_{A\tau} = 4\) м/с\(^2\)
\(r = 0,5\) м
Решение:
1. Описание вида движения звеньев:
* Звено 1 (диск): Совершает плоское движение, которое можно представить как сумму поступательного движения со скоростью центра \(A\) и вращательного движения вокруг центра \(A\). Поскольку диск катится по неподвижной поверхности, его движение является сложным.
* Звено 2 (стержень, соединяющий диск с точкой \(D\)): Совершает плоское движение.
* Точка \(D\): Совершает прямолинейное поступательное движение вдоль вертикальной направляющей.
2. Определение скоростей точек и угловых скоростей звеньев:
2.1. Скорости и угловая скорость диска (звено 1):
Поскольку диск катится без скольжения по неподвижной поверхности, мгновенный центр скоростей (МЦС) находится в точке касания диска с поверхностью. Обозначим эту точку как \(P\).
Из рисунка видно, что точка \(A\) является центром диска, а точка \(C\) находится на окружности диска. Точка \(B\) также находится на окружности диска, диаметрально противоположно точке \(C\) относительно точки \(A\).
Скорость точки \(A\) (центра диска) задана: \(V_A = 2\) м/с.
Направление скорости \(V_A\) горизонтально вправо.
Угловая скорость диска \(\omega_1\) определяется как отношение скорости центра диска к радиусу:
\[\omega_1 = \frac{V_A}{r}\]
Подставляем значения:
\[\omega_1 = \frac{2 \text{ м/с}}{0,5 \text{ м}} = 4 \text{ рад/с}\]
Направление вращения диска по часовой стрелке, так как \(V_A\) направлена вправо.
Скорость точки \(B\):
Точка \(B\) находится на окружности диска, вертикально вверх от центра \(A\).
Скорость точки \(B\) относительно МЦС \(P\) равна:
\[V_B = \omega_1 \cdot PB\]
Где \(PB\) - расстояние от МЦС \(P\) до точки \(B\).
Из геометрии видно, что \(PB = \sqrt{PA^2 + AB^2} = \sqrt{r^2 + r^2} = r\sqrt{2}\).
\[V_B = \omega_1 \cdot r\sqrt{2} = 4 \text{ рад/с} \cdot 0,5 \text{ м} \cdot \sqrt{2} = 2\sqrt{2} \text{ м/с} \approx 2,83 \text{ м/с}\]
Направление скорости \(V_B\) перпендикулярно отрезку \(PB\).
Скорость точки \(C\):
Точка \(C\) находится на окружности диска, горизонтально вправо от центра \(A\).
Скорость точки \(C\) относительно МЦС \(P\) равна:
\[V_C = \omega_1 \cdot PC\]
Где \(PC\) - расстояние от МЦС \(P\) до точки \(C\).
Из геометрии видно, что \(PC = \sqrt{PA^2 + AC^2} = \sqrt{r^2 + r^2} = r\sqrt{2}\).
\[V_C = \omega_1 \cdot r\sqrt{2} = 4 \text{ рад/с} \cdot 0,5 \text{ м} \cdot \sqrt{2} = 2\sqrt{2} \text{ м/с} \approx 2,83 \text{ м/с}\]
Направление скорости \(V_C\) перпендикулярно отрезку \(PC\).
2.2. Скорость точки \(D\) и угловая скорость звена 2:
Точка \(D\) движется по вертикальной направляющей, поэтому ее скорость \(V_D\) направлена вертикально.
Звено 2 соединяет точку \(C\) диска с точкой \(D\).
Для определения скорости \(V_D\) и угловой скорости звена 2 (\(\omega_2\)) используем метод мгновенного центра скоростей для звена 2 или метод проекций.
Метод проекций:
Скорость точки \(D\) можно выразить через скорость точки \(C\) и угловую скорость звена 2:
\[\vec{V_D} = \vec{V_C} + \vec{\omega_2} \times \vec{CD}\]
Из рисунка видно, что звено \(CD\) расположено под углом 45 градусов к горизонтали (так как \(C\) находится на уровне \(A\), а \(D\) - на вертикальной направляющей, и, судя по симметрии, \(CD\) является диагональю квадрата со стороной \(r\)).
Тогда \(CD = r\sqrt{2}\).
Проектируем скорости на оси координат. Пусть ось \(x\) горизонтальна, ось \(y\) вертикальна.
\(V_{Cx} = V_A = 2\) м/с (так как \(C\) находится на уровне \(A\), и \(V_C\) имеет горизонтальную составляющую, равную \(V_A\)).
\(V_{Cy} = \omega_1 \cdot r = 4 \text{ рад/с} \cdot 0,5 \text{ м} = 2\) м/с (направлена вниз).
Таким образом, \(\vec{V_C} = (2; -2)\) м/с.
Пусть \(\omega_2\) направлена против часовой стрелки.
\(\vec{CD}\) имеет компоненты \((r; -r)\) или \((-r; r)\) в зависимости от расположения \(D\) относительно \(C\).
Из рисунка видно, что \(D\) находится выше и левее \(C\).
Тогда \(\vec{CD} = (-r; r) = (-0,5; 0,5)\) м.
\(\vec{\omega_2} \times \vec{CD} = (0; 0; \omega_2) \times (-0,5; 0,5; 0) = (-\omega_2 \cdot 0,5; -\omega_2 \cdot 0,5; 0)\).
\(\vec{V_D} = (0; V_D)\)
\[(0; V_D) = (2; -2) + (-\omega_2 \cdot 0,5; -\omega_2 \cdot 0,5)\]
По компонентам:
\(0 = 2 - 0,5 \omega_2 \Rightarrow 0,5 \omega_2 = 2 \Rightarrow \omega_2 = 4 \text{ рад/с}\) (против часовой стрелки).
\(V_D = -2 - 0,5 \omega_2 = -2 - 0,5 \cdot 4 = -2 - 2 = -4\) м/с.
Знак минус означает, что \(V_D\) направлена вниз.
Итак, \(V_D = 4\) м/с (вниз).
3. Определение ускорений точек и угловых ускорений звеньев:
3.1. Ускорения и угловое ускорение диска (звено 1):
Ускорение центра диска \(A\):
Тангенциальное ускорение точки \(A\) задано: \(a_{A\tau} = 4\) м/с\(^2\).
Направление \(a_{A\tau}\) совпадает с направлением \(V_A\), то есть горизонтально вправо.
Нормальное ускорение точки \(A\) равно нулю, так как \(A\) - центр вращения для относительного движения диска.
Таким образом, \(\vec{a_A} = (4; 0)\) м/с\(^2\).
Угловое ускорение диска \(\varepsilon_1\):
\[\varepsilon_1 = \frac{a_{A\tau}}{r}\]
\[\varepsilon_1 = \frac{4 \text{ м/с}^2}{0,5 \text{ м}} = 8 \text{ рад/с}^2\]
Направление \(\varepsilon_1\) совпадает с направлением \(\omega_1\), то есть по часовой стрелке.
Ускорение точки \(B\):
Ускорение точки \(B\) можно найти как сумму ускорения точки \(A\) и ускорения точки \(B\) относительно \(A\):
\[\vec{a_B} = \vec{a_A} + \vec{a_{BA}}\]
Ускорение \(\vec{a_{BA}}\) состоит из тангенциальной и нормальной составляющих:
\[\vec{a_{BA}} = \vec{a_{BA\tau}} + \vec{a_{BA\nu}}\]
\[a_{BA\tau} = \varepsilon_1 \cdot AB = \varepsilon_1 \cdot r = 8 \text{ рад/с}^2 \cdot 0,5 \text{ м} = 4 \text{ м/с}^2\]
Направление \(a_{BA\tau}\) перпендикулярно \(AB\) и совпадает с направлением вращения \(\varepsilon_1\). Для точки \(B\) (вверху) это будет горизонтально вправо.
\[a_{BA\nu} = \omega_1^2 \cdot AB = \omega_1^2 \cdot r = (4 \text{ рад/с})^2 \cdot 0,5 \text{ м} = 16 \cdot 0,5 = 8 \text{ м/с}^2\]
Направление \(a_{BA\nu}\) направлено к центру \(A\), то есть вертикально вниз.
Тогда \(\vec{a_B} = (4; 0) + (4; -8) = (8; -8)\) м/с\(^2\).
Модуль ускорения \(a_B = \sqrt{8^2 + (-8)^2} = \sqrt{64 + 64} = \sqrt{128} = 8\sqrt{2} \text{ м/с}^2 \approx 11,31 \text{ м/с}^2\).
Ускорение точки \(C\):
Ускорение точки \(C\) можно найти как сумму ускорения точки \(A\) и ускорения точки \(C\) относительно \(A\):
\[\vec{a_C} = \vec{a_A} + \vec{a_{CA}}\]
Ускорение \(\vec{a_{CA}}\) состоит из тангенциальной и нормальной составляющих:
\[\vec{a_{CA}} = \vec{a_{CA\tau}} + \vec{a_{CA\nu}}\]
\[a_{CA\tau} = \varepsilon_1 \cdot AC = \varepsilon_1 \cdot r = 8 \text{ рад/с}^2 \cdot 0,5 \text{ м} = 4 \text{ м/с}^2\]
Направление \(a_{CA\tau}\) перпендикулярно \(AC\) и совпадает с направлением вращения \(\varepsilon_1\). Для точки \(C\) (справа) это будет вертикально вниз.
\[a_{CA\nu} = \omega_1^2 \cdot AC = \omega_1^2 \cdot r = (4 \text{ рад/с})^2 \cdot 0,5 \text{ м} = 16 \cdot 0,5 = 8 \text{ м/с}^2\]
Направление \(a_{CA\nu}\) направлено к центру \(A\), то есть горизонтально влево.
Тогда \(\vec{a_C} = (4; 0) + (-8; -4) = (-4; -4)\) м/с\(^2\).
Модуль ускорения \(a_C = \sqrt{(-4)^2 + (-4)^2} = \sqrt{16 + 16} = \sqrt{32} = 4\sqrt{2} \text{ м/с}^2 \approx 5,66 \text{ м/с}^2\).
3.2. Ускорение точки \(D\) и угловое ускорение звена 2:
Точка \(D\) движется по вертикальной направляющей, поэтому ее ускорение \(\vec{a_D}\) направлено вертикально.
Для определения ускорения \(a_D\) и углового ускорения звена 2 (\(\varepsilon_2\)) используем метод проекций.
\[\vec{a_D} = \vec{a_C} + \vec{a_{DC}}\]
\[\vec{a_{DC}} = \vec{a_{DC\tau}} + \vec{a_{DC\nu}}\]
\[a_{DC\tau} = \varepsilon_2 \cdot CD = \varepsilon_2 \cdot r\sqrt{2}\]
Направление \(a_{DC\tau}\) перпендикулярно \(CD\).
\[a_{DC\nu} = \omega_2^2 \cdot CD = \omega_2^2 \cdot r\sqrt{2} = (4 \text{ рад/с})^2 \cdot 0,5 \text{ м} \cdot \sqrt{2} = 16 \cdot 0,5 \cdot \sqrt{2} = 8\sqrt{2} \text{ м/с}^2\]
Направление \(a_{DC\nu}\) направлено к центру вращения звена 2 (если бы оно вращалось вокруг \(C\)), то есть вдоль \(DC\) к \(C\).
Координаты:
\(\vec{a_D} = (0; a_D)\)
\(\vec{a_C} = (-4; -4)\) м/с\(^2\)
Вектор \(\vec{CD} = (-0,5; 0,5)\) м.
Угол наклона звена \(CD\) к горизонтали 45 градусов.
Нормальное ускорение \(\vec{a_{DC\nu}}\) направлено вдоль \(DC\) к \(C\). Его компоненты:
\(a_{DC\nu x} = a_{DC\nu} \cos(45^\circ) = 8\sqrt{2} \cdot \frac{\sqrt{2}}{2} = 8\) м/с\(^2\) (вправо)
\(a_{DC\nu y} = a_{DC\nu} \sin(45^\circ) = 8\sqrt{2} \cdot \frac{\sqrt{2}}{2} = 8\) м/с\(^2\) (вниз)
Таким образом, \(\vec{a_{DC\nu}} = (8; -8)\) м/с\(^2\).
Тангенциальное ускорение \(\vec{a_{DC\tau}}\) перпендикулярно \(CD\).
Если \(\varepsilon_2\) против часовой стрелки, то \(\vec{a_{DC\tau}}\) направлено вверх-вправо.
Его компоненты:
\(a_{DC\tau x} = a_{DC\tau} \cos(45^\circ) = \varepsilon_2 \cdot r\sqrt{2} \cdot \frac{\sqrt{2}}{2} = \varepsilon_2 \cdot r = 0,5 \varepsilon_2\)
\(a_{DC\tau y} = a_{DC\tau} \sin(45^\circ) = \varepsilon_2 \cdot r\sqrt{2} \cdot \frac{\sqrt{2}}{2} = \varepsilon_2 \cdot r = 0,5 \varepsilon_2\)
Таким образом, \(\vec{a_{DC\tau}} = (0,5 \varepsilon_2; 0,5 \varepsilon_2)\).
Теперь собираем уравнение для ускорений:
\[(0; a_D) = (-4; -4) + (8; -8) + (0,5 \varepsilon_2; 0,5 \varepsilon_2)\]
По компонентам:
\(0 = -4 + 8 + 0,5 \varepsilon_2\)
\(0 = 4 + 0,5 \varepsilon_2\)
\(0,5 \varepsilon_2 = -4 \Rightarrow \varepsilon_2 = -8 \text{ рад/с}^2\)
Знак минус означает, что \(\varepsilon_2\) направлено по часовой стрелке.
\(a_D = -4 - 8 + 0,5 \varepsilon_2\)
\(a_D = -12 + 0,5 \cdot (-8)\)
\(a_D = -12 - 4 = -16\) м/с\(^2\)
Знак минус означает, что \(a_D\) направлено вниз.
Итак, \(a_D = 16\) м/с\(^2\) (вниз).
Итоги:
Вид движения звеньев:
* Звено 1 (диск): Плоское движение (качение без скольжения).
* Звено 2 (стержень \(CD\)): Плоское движение.
* Точка \(D\): Поступательное прямолинейное движение по вертикальной направляющей.
Скорости точек:
* \(V_A = 2\) м/с (горизонтально вправо)
* \(V_B = 2\sqrt{2} \approx 2,83\) м/с (направление: под углом 45 градусов к горизонтали, вверх-влево относительно МЦС \(P\))
* \(V_C = 2\sqrt{2} \approx 2,83\) м/с (направление: под углом 45 градусов к горизонтали, вверх-вправо относительно МЦС \(P\))
* \(V_D = 4\) м/с (вертикально вниз)
Угловые скорости звеньев:
* \(\omega_1 = 4\) рад/с (по часовой стрелке)
* \(\omega_2 = 4\) рад/с (против часовой стрелки)
Ускорения точек:
* \(\vec{a_A} = (4; 0)\) м/с\(^2\) (горизонтально вправо)
* \(\vec{a_B} = (8; -8)\) м/с\(^2\), \(a_B = 8\sqrt{2} \approx 11,31\) м/с\(^2\)
* \(\vec{a_C} = (-4; -4)\) м/с\(^2\), \(a_C = 4\sqrt{2} \approx 5,66\) м/с\(^2\)
* \(\vec{a_D} = (0; -16)\) м/с\(^2\), \(a_D = 16\) м/с\(^2\) (вертикально вниз)
Угловые ускорения звеньев:
* \(\varepsilon_1 = 8\) рад/с\(^2\) (по часовой стрелке)
* \(\varepsilon_2 = 8\) рад/с\(^2\) (по часовой стрелке)