Хорошо, давайте разберем эту задачу по кинематике.
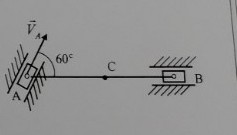
На изображении показан кривошипно-шатунный механизм. Точка A - это ползун, который движется вдоль наклонной направляющей. Точка B - это другой ползун, который движется горизонтально. Точка C - это середина шатуна AB.
Нам дано:
1. Скорость ползуна A, обозначенная как \(\vec{V_A}\).
2. Угол между вектором скорости \(\vec{V_A}\) и горизонтальной линией, который равен 60 градусам.
Предполагается, что задача состоит в том, чтобы найти что-то, связанное с движением этого механизма, например, скорость точки B, скорость точки C, или угловую скорость шатуна AB. Поскольку конкретный вопрос не задан, я рассмотрю наиболее вероятные варианты.
1. Определение составляющих скорости ползуна A
Если нам известна величина скорости \(V_A\), мы можем разложить ее на горизонтальную \(V_{Ax}\) и вертикальную \(V_{Ay}\) составляющие.
Из геометрии видно, что угол между вектором скорости \(\vec{V_A}\) и горизонтальной осью составляет 60 градусов.
Тогда:
\[V_{Ax} = V_A \cos(60^\circ)\]
\[V_{Ay} = V_A \sin(60^\circ)\]
Мы знаем, что \(\cos(60^\circ) = 0.5\) и \(\sin(60^\circ) = \frac{\sqrt{3}}{2} \approx 0.866\).
Значит:
\[V_{Ax} = 0.5 V_A\]
\[V_{Ay} = \frac{\sqrt{3}}{2} V_A\]
2. Определение скорости ползуна B и угловой скорости шатуна AB (метод мгновенного центра скоростей)
Для решения таких задач часто используется метод мгновенного центра скоростей (МЦС).
МЦС - это точка, относительно которой все точки твердого тела (в данном случае шатуна AB) в данный момент времени вращаются.
Построение МЦС для шатуна AB:
1. Скорость точки A направлена под углом 60 градусов к горизонтали. Линия, перпендикулярная \(\vec{V_A}\) и проходящая через A, будет проходить через МЦС.
2. Скорость точки B направлена горизонтально (ползун B движется по горизонтальной направляющей). Линия, перпендикулярная \(\vec{V_B}\) и проходящая через B, будет вертикальной и также будет проходить через МЦС.
Пересечение этих двух перпендикуляров даст нам положение МЦС.
Пусть длина шатуна AB равна \(L\).
Обозначим МЦС как точку P.
Из рисунка видно, что направляющая для A наклонена под углом 60 градусов к горизонтали. Вектор скорости \(\vec{V_A}\) направлен вдоль этой направляющей.
Перпендикуляр к \(\vec{V_A}\) в точке A будет направлен под углом \(60^\circ + 90^\circ = 150^\circ\) к горизонтали (или \(90^\circ - 60^\circ = 30^\circ\) к вертикали).
Давайте уточним: направляющая для A наклонена под углом 60 градусов к горизонтали. Вектор скорости \(\vec{V_A}\) направлен вдоль этой направляющей.
Перпендикуляр к направляющей (и к \(\vec{V_A}\)) в точке A будет направлен под углом \(60^\circ + 90^\circ = 150^\circ\) к горизонтали (если отсчитывать против часовой стрелки от положительного направления оси X) или под углом \(60^\circ - 90^\circ = -30^\circ\) (то есть 30 градусов ниже горизонтали).
Линия, перпендикулярная \(\vec{V_A}\) в точке A, будет иметь наклон 30 градусов к вертикали.
Линия, перпендикулярная \(\vec{V_B}\) в точке B, будет вертикальной.
Пусть точка A находится в начале координат для удобства.
Координаты точки B: \((L, 0)\) (если шатун горизонтален).
Однако, положение шатуна меняется.
Давайте рассмотрим треугольник, образованный точками A, B и МЦС (P).
Угол между шатуном AB и горизонталью обозначим как \(\alpha\).
Угол между шатуном AB и вертикалью обозначим как \(\beta\).
Известно, что:
\[V_A = \omega \cdot PA\]
\[V_B = \omega \cdot PB\]
где \(\omega\) - угловая скорость шатуна AB.
Для определения положения МЦС:
1. Проводим линию, перпендикулярную \(\vec{V_A}\) через A.
2. Проводим линию, перпендикулярную \(\vec{V_B}\) через B.
Пересечение этих линий - МЦС (P).
В данном случае, \(\vec{V_A}\) направлена под углом 60 градусов к горизонтали.
Перпендикуляр к \(\vec{V_A}\) в точке A будет направлен под углом \(60^\circ - 90^\circ = -30^\circ\) к горизонтали (или 30 градусов ниже горизонтали).
\(\vec{V_B}\) направлена горизонтально.
Перпендикуляр к \(\vec{V_B}\) в точке B будет вертикальным.
Рассмотрим треугольник APB.
Угол \(\angle PAB\) будет равен углу между шатуном AB и перпендикуляром к \(\vec{V_A}\).
Угол \(\angle PBA\) будет равен углу между шатуном AB и перпендикуляром к \(\vec{V_B}\) (вертикалью).
Если шатун AB в данный момент горизонтален, то:
Угол между шатуном AB и перпендикуляром к \(\vec{V_A}\) (который под углом -30 градусов к горизонтали) будет \(0 - (-30^\circ) = 30^\circ\). Значит, \(\angle PAB = 30^\circ\).
Угол между шатуном AB (горизонталью) и перпендикуляром к \(\vec{V_B}\) (вертикалью) будет \(90^\circ\). Значит, \(\angle PBA = 90^\circ\).
Тогда в треугольнике APB:
\(\angle APB = 180^\circ - 30^\circ - 90^\circ = 60^\circ\).
Используя теорему синусов в треугольнике APB:
\[\frac{L}{\sin(60^\circ)} = \frac{PA}{\sin(90^\circ)} = \frac{PB}{\sin(30^\circ)}\]
Отсюда:
\[PA = \frac{L \sin(90^\circ)}{\sin(60^\circ)} = \frac{L}{\frac{\sqrt{3}}{2}} = \frac{2L}{\sqrt{3}}\]
\[PB = \frac{L \sin(30^\circ)}{\sin(60^\circ)} = \frac{L \cdot \frac{1}{2}}{\frac{\sqrt{3}}{2}} = \frac{L}{\sqrt{3}}\]
Теперь мы можем найти угловую скорость \(\omega\):
\[\omega = \frac{V_A}{PA} = \frac{V_A}{\frac{2L}{\sqrt{3}}} = \frac{\sqrt{3} V_A}{2L}\]
И скорость ползуна B:
\[V_B = \omega \cdot PB = \left(\frac{\sqrt{3} V_A}{2L}\right) \cdot \frac{L}{\sqrt{3}} = \frac{V_A}{2}\]
3. Определение скорости точки C (середины шатуна AB)
Точка C находится в середине шатуна AB.
Ее скорость \(\vec{V_C}\) также можно найти, используя МЦС.
Расстояние от МЦС до точки C, \(PC\), можно найти по теореме косинусов в треугольнике APC или BPC.
Или, что проще, \(\vec{V_C}\) - это вектор, который можно найти как среднее арифметическое векторов скоростей \(\vec{V_A}\) и \(\vec{V_B}\), если шатун движется поступательно. Но здесь движение плоскопараллельное.
Скорость точки C можно найти как:
\[\vec{V_C} = \vec{V_A} + \vec{\omega} \times \vec{AC}\]
или
\[\vec{V_C} = \vec{V_B} + \vec{\omega} \times \vec{BC}\]
Поскольку C - середина AB, то \(\vec{AC} = -\vec{BC}\) и \(AC = BC = L/2\).
Вектор \(\vec{\omega}\) перпендикулярен плоскости движения.
Величина скорости \(V_C = \omega \cdot PC\).
Для нахождения \(PC\), можно использовать теорему косинусов в треугольнике APB.
Точка C - середина AB.
Координаты A: \((0, 0)\)
Координаты B: \((L, 0)\) (если шатун горизонтален)
Координаты C: \((L/2, 0)\)
Координаты МЦС (P):
Мы знаем, что перпендикуляр к \(\vec{V_A}\) в точке A имеет наклон -30 градусов к горизонтали.
Уравнение этой линии: \(y - 0 = \tan(-30^\circ) (x - 0)\)
\[y = -\frac{1}{\sqrt{3}} x\]
Перпендикуляр к \(\vec{V_B}\) в точке B вертикален.
Уравнение этой линии: \(x = L\)
Пересечение:
\[y_P = -\frac{1}{\sqrt{3}} L\]
\[x_P = L\]
Значит, координаты P: \((L, -\frac{L}{\sqrt{3}})\).
Теперь найдем расстояние \(PC\):
\[PC = \sqrt{(x_C - x_P)^2 + (y_C - y_P)^2}\]
\[PC = \sqrt{\left(\frac{L}{2} - L\right)^2 + \left(0 - \left(-\frac{L}{\sqrt{3}}\right)\right)^2}\]
\[PC = \sqrt{\left(-\frac{L}{2}\right)^2 + \left(\frac{L}{\sqrt{3}}\right)^2}\]
\[PC = \sqrt{\frac{L^2}{4} + \frac{L^2}{3}}\]
\[PC = \sqrt{\frac{3L^2 + 4L^2}{12}} = \sqrt{\frac{7L^2}{12}} = \frac{L\sqrt{7}}{\sqrt{12}} = \frac{L\sqrt{7}}{2\sqrt{3}} = \frac{L\sqrt{21}}{6}\]
Тогда скорость точки C:
\[V_C = \omega \cdot PC = \left(\frac{\sqrt{3} V_A}{2L}\right) \cdot \left(\frac{L\sqrt{21}}{6}\right)\]
\[V_C = \frac{\sqrt{3} V_A \sqrt{21}}{12} = \frac{V_A \sqrt{3 \cdot 21}}{12} = \frac{V_A \sqrt{63}}{12} = \frac{V_A \cdot 3\sqrt{7}}{12} = \frac{V_A \sqrt{7}}{4}\]
Направление скорости \(\vec{V_C}\) будет перпендикулярно линии PC.
Итоги (при условии, что шатун AB горизонтален в данный момент):
1. Угловая скорость шатуна AB: \[\omega = \frac{\sqrt{3} V_A}{2L}\]
2. Скорость ползуна B: \[V_B = \frac{V_A}{2}\]
3. Скорость точки C (середины шатуна AB): \[V_C = \frac{V_A \sqrt{7}}{4}\]
Важное замечание:
Все эти расчеты сделаны при предположении, что шатун AB в данный момент находится в горизонтальном положении. Если шатун AB находится под каким-либо углом к горизонтали, то расчеты будут более сложными, так как изменится положение МЦС и углы в треугольнике APB.
Если бы был задан конкретный вопрос, например, "Найти скорость точки B", то ответ был бы \(V_B = \frac{V_A}{2}\) при условии горизонтального положения шатуна.
Если задача требует общего решения без предположения о горизонтальности шатуна, то нужно ввести угол \(\phi\) - угол наклона шатуна AB к горизонтали. Тогда:
1. Перпендикуляр к \(\vec{V_A}\) в точке A: угол \(-30^\circ\) к горизонтали.
2. Перпендикуляр к \(\vec{V_B}\) в точке B: вертикальная линия.
3. Угол \(\angle PAB\) будет равен \(\phi - (-30^\circ) = \phi + 30^\circ\).
4. Угол \(\angle PBA\) будет равен \(90^\circ - \phi\).
5. Угол \(\angle APB = 180^\circ - (\phi + 30^\circ) - (90^\circ - \phi) = 180^\circ - \phi - 30^\circ - 90^\circ + \phi = 60^\circ\).
Интересно, что угол \(\angle APB\) всегда 60 градусов, независимо от угла \(\phi\) наклона шатуна! Это упрощает задачу.
Тогда:
\[\frac{L}{\sin(60^\circ)} = \frac{PA}{\sin(90^\circ - \phi)} = \frac{PB}{\sin(\phi + 30^\circ)}\]
\[PA = \frac{L \cos(\phi)}{\sin(60^\circ)} = \frac{L \cos(\phi)}{\frac{\sqrt{3}}{2}} = \frac{2L \cos(\phi)}{\sqrt{3}}\]
\[PB = \frac{L \sin(\phi + 30^\circ)}{\sin(60^\circ)} = \frac{L \sin(\phi + 30^\circ)}{\frac{\sqrt{3}}{2}} = \frac{2L \sin(\phi + 30^\circ)}{\sqrt{3}}\]
Угловая скорость \(\omega\):
\[\omega = \frac{V_A}{PA} = \frac{V_A}{\frac{2L \cos(\phi)}{\sqrt{3}}} = \frac{\sqrt{3} V_A}{2L \cos(\phi)}\]
Скорость ползуна B:
\[V_B = \omega \cdot PB = \left(\frac{\sqrt{3} V_A}{2L \cos(\phi)}\right) \cdot \left(\frac{2L \sin(\phi + 30^\circ)}{\sqrt{3}}\right) = V_A \frac{\sin(\phi + 30^\circ)}{\cos(\phi)}\]
Это более общее решение. Если \(\phi = 0\) (шатун горизонтален), то:
\[V_B = V_A \frac{\sin(30^\circ)}{\cos(0^\circ)} = V_A \frac{1/2}{1} = \frac{V_A}{2}\]
Что совпадает с нашим предыдущим результатом.
Для школьника, скорее всего, предполагается, что шатун находится в каком-то конкретном положении, или нужно найти общие зависимости. Если нет дополнительных данных, то обычно рассматривают текущее положение, как оно нарисовано, или просят найти зависимости от угла.
Если нужно переписать в тетрадь, я бы предложил следующий формат:
---
Задача по кинематике кривошипно-шатунного механизма
Дано:
На рисунке изображен кривошипно-шатунный механизм.
Ползун A движется по наклонной направляющей.
Ползун B движется по горизонтальной направляющей.
Скорость ползуна A обозначена как \(\vec{V_A}\).
Угол наклона направляющей для A (и, соответственно, угол между \(\vec{V_A}\) и горизонталью) равен 60 градусам.
Точка C - середина шатуна AB.
Длина шатуна AB обозначим как \(L\).
Угол наклона шатуна AB к горизонтали обозначим как \(\phi\).
Найти:
(Предположим, что требуется найти угловую скорость шатуна AB, скорость ползуна B и скорость точки C в зависимости от угла \(\phi\)).
Решение:
Для решения задачи используем метод мгновенного центра скоростей (МЦС). МЦС - это точка, относительно которой все точки твердого тела (шатуна AB) в данный момент вращаются.
1. Построение МЦС (обозначим его как P):
* Скорость ползуна A, \(\vec{V_A}\), направлена вдоль наклонной направляющей под углом 60 градусов к горизонтали. Линия, перпендикулярная \(\vec{V_A}\) и проходящая через точку A, будет проходить через МЦС. Эта линия будет иметь наклон \(60^\circ - 90^\circ = -30^\circ\) к горизонтали (то есть