school
Общие знания
verified
Решено AI
Решение задачи 25: Определение скоростей и угловых скоростей
help_outline
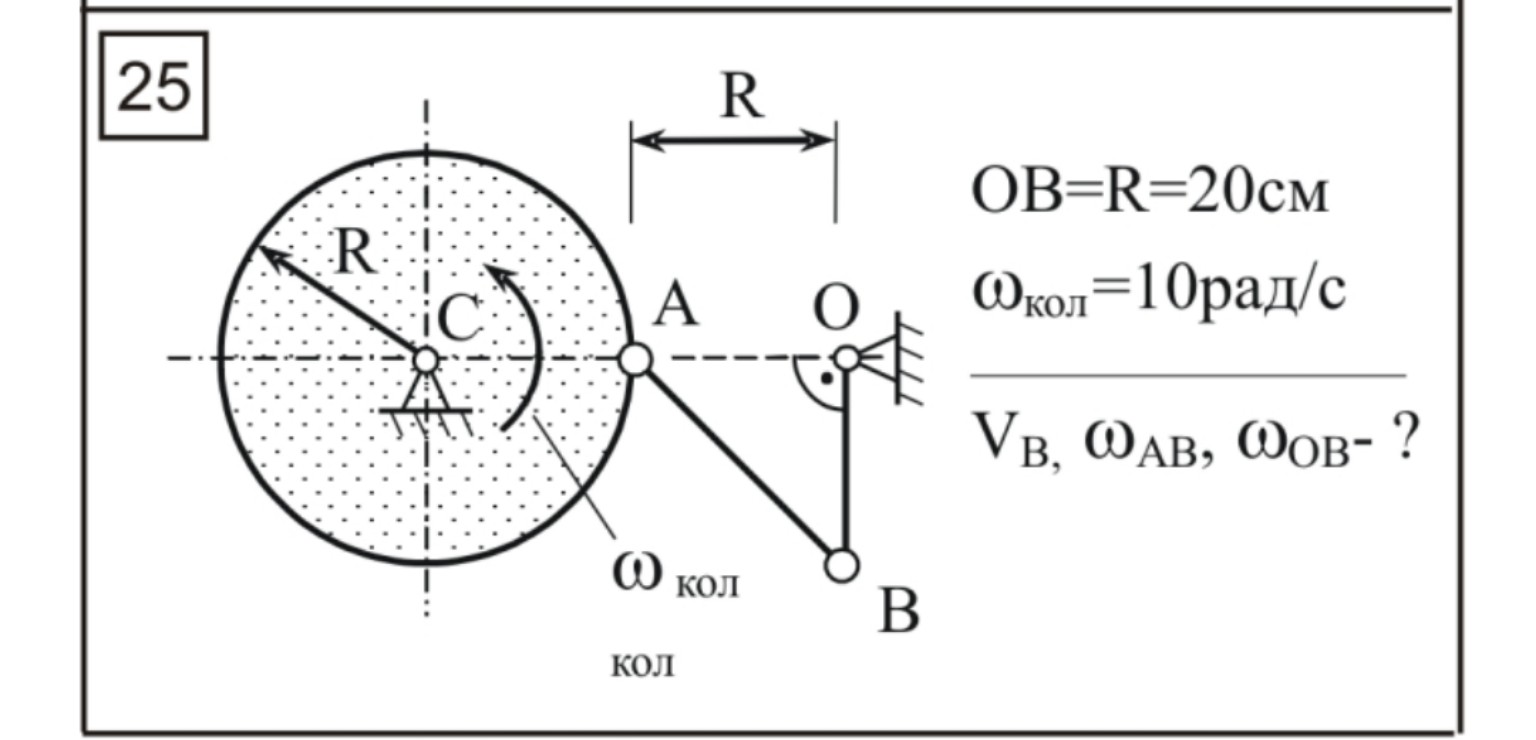
Условие задачи
lightbulb
Краткий ответ
Задача решена с использованием формул для определения линейной и угловой скоростей. Найдены значения скорости точки B, угловой скорости стержня AB и угловой скорости стержня OB.
Подробное решение
Решение задачи 25.
Дано:
Радиус колеса \(R\)
Длина стержня \(OB = R = 20\) см \( = 0.2\) м
Угловая скорость колеса \(\omega_{\text{кол}} = 10\) рад/с
Найти:
Скорость точки \(B\), \(V_B\)
Угловую скорость стержня \(AB\), \(\omega_{AB}\)
Угловую скорость стержня \(OB\), \(\omega_{OB}\)
Решение:
1. Определим скорость точки \(A\).
Точка \(A\) находится на ободе колеса, которое вращается вокруг центра \(C\).
Скорость точки \(A\) определяется формулой:
\[V_A = \omega_{\text{кол}} \cdot R\]
Подставим значения:
\[V_A = 10 \text{ рад/с} \cdot 0.2 \text{ м} = 2 \text{ м/с}\]
Направление скорости \(V_A\) перпендикулярно радиусу \(CA\) и направлено вниз, так как колесо вращается по часовой стрелке.
2. Рассмотрим движение стержня \(OB\).
Стержень \(OB\) вращается вокруг неподвижной точки \(O\).
Точка \(A\) является точкой соединения стержней \(AB\) и \(OA\).
Из рисунка видно, что в данный момент времени точка \(A\) находится на одной горизонтальной линии с точкой \(O\).
Стержень \(OB\) образует с горизонталью угол 90 градусов, то есть он расположен вертикально.
Скорость точки \(A\) (как части стержня \(OA\)) направлена перпендикулярно \(OA\). Однако, на рисунке точка \(A\) является частью стержня \(AB\), а точка \(O\) является центром вращения стержня \(OB\).
Поскольку точка \(A\) находится на горизонтальной линии с \(O\), а стержень \(OB\) вертикален, то \(OA\) - это горизонтальное расстояние между центром колеса и точкой \(O\).
Из рисунка видно, что расстояние \(CA = R\), а расстояние от центра колеса до точки \(A\) равно \(R\). Расстояние \(CO\) равно \(R\).
Значит, \(OA = R\).
Скорость точки \(A\) (как части стержня \(AB\)) направлена вниз.
Скорость точки \(A\) (как части стержня \(OB\)) должна быть перпендикулярна \(OA\). Но \(A\) не является частью стержня \(OB\).
Точка \(A\) является частью колеса и частью стержня \(AB\).
Точка \(O\) является неподвижной опорой для стержня \(OB\).
Точка \(B\) является концом стержня \(OB\).
Давайте перечитаем условие. \(OB = R = 20\) см.
На рисунке показано, что точка \(A\) находится на горизонтальной линии, проходящей через центр \(C\) колеса и точку \(O\).
Расстояние от \(C\) до \(A\) равно \(R\).
Расстояние от \(C\) до \(O\) равно \(R\).
Значит, точка \(A\) находится ровно посередине между \(C\) и \(O\).
Это означает, что \(CA = AO = R\).
Тогда \(CO = CA + AO = R + R = 2R\).
Но на рисунке указано, что расстояние от \(C\) до \(A\) равно \(R\), и расстояние от \(A\) до \(O\) также равно \(R\).
Это противоречит тому, что \(A\) находится на ободе колеса, если \(C\) - центр колеса.
Давайте предположим, что \(R\) на колесе - это радиус колеса, а \(R\) между \(A\) и \(O\) - это длина отрезка \(AO\).
Тогда \(CA = R_{\text{колеса}}\).
И \(AO = R_{\text{отрезка}}\).
Но в условии дано \(OB = R = 20\) см. Это означает, что \(R\) - это длина стержня \(OB\).
Также на рисунке указано, что радиус колеса равен \(R\).
И расстояние \(AO\) также обозначено как \(R\).
Значит, \(R_{\text{колеса}} = R_{\text{отрезка}} = OB = R = 20\) см.
Итак, \(CA = R\), \(AO = R\), \(OB = R\).
Точка \(A\) находится на ободе колеса.
Скорость точки \(A\) (как части колеса):
\[V_A = \omega_{\text{кол}} \cdot R = 10 \text{ рад/с} \cdot 0.2 \text{ м} = 2 \text{ м/с}\]
Направление \(V_A\) - вертикально вниз.
3. Рассмотрим стержень \(OB\).
Стержень \(OB\) вращается вокруг неподвижной точки \(O\).
В данный момент стержень \(OB\) расположен вертикально.
Точка \(A\) находится на горизонтальной линии с \(O\).
Стержень \(AB\) соединяет точку \(A\) и точку \(B\).
Длина стержня \(AB\) неизвестна.
В треугольнике \(OAB\):
Сторона \(OA = R\).
Сторона \(OB = R\).
Угол между \(OA\) и \(OB\) равен 90 градусов (так как \(OA\) горизонтально, \(OB\) вертикально).
Значит, треугольник \(OAB\) - прямоугольный и равнобедренный.
Длина стержня \(AB\) по теореме Пифагора:
\[AB = \sqrt{OA^2 + OB^2} = \sqrt{R^2 + R^2} = \sqrt{2R^2} = R\sqrt{2}\]
\[AB = 0.2 \text{ м} \cdot \sqrt{2} \approx 0.2828 \text{ м}\]
4. Определим угловую скорость стержня \(OB\), \(\omega_{OB}\).
Скорость точки \(B\) (как части стержня \(OB\)) направлена перпендикулярно \(OB\).
Скорость точки \(A\) (как части стержня \(OB\)) также направлена перпендикулярно \(OA\).
Но точка \(A\) не является частью стержня \(OB\).
Точка \(A\) является частью стержня \(AB\).
Скорость точки \(A\) известна: \(V_A = 2\) м/с, направлена вниз.
Рассмотрим стержень \(OB\). Он вращается вокруг \(O\).
Скорость точки \(B\) (как части стержня \(OB\)) равна:
\[V_B = \omega_{OB} \cdot OB = \omega_{OB} \cdot R\]
Направление \(V_B\) - горизонтально вправо (если \(\omega_{OB}\) против часовой стрелки) или влево (если \(\omega_{OB}\) по часовой стрелке).
Рассмотрим стержень \(AB\).
Скорость точки \(A\) известна: \(V_A = 2\) м/с, вниз.
Скорость точки \(B\) неизвестна.
Для стержня \(AB\), скорость точки \(B\) относительно \(A\) равна:
\[\vec{V}_B = \vec{V}_A + \vec{V}_{B/A}\]
где \(\vec{V}_{B/A}\) - скорость точки \(B\) относительно \(A\), которая равна \(\omega_{AB} \cdot AB\) и направлена перпендикулярно \(AB\).
Метод мгновенного центра скоростей для стержня \(AB\).
Скорость \(V_A\) направлена вертикально вниз.
Скорость \(V_B\) направлена горизонтально (перпендикулярно \(OB\)).
Мгновенный центр скоростей \(P\) для стержня \(AB\) находится на пересечении перпендикуляров к скоростям \(V_A\) и \(V_B\).
Перпендикуляр к \(V_A\) (вертикально вниз) - это горизонтальная линия, проходящая через \(A\).
Перпендикуляр к \(V_B\) (горизонтально) - это вертикальная линия, проходящая через \(B\).
Эти две линии пересекаются в точке \(O\).
Значит, мгновенный центр скоростей для стержня \(AB\) - это точка \(O\).
Если \(O\) - мгновенный центр скоростей для стержня \(AB\), то:
\[V_A = \omega_{AB} \cdot OA\]
\[V_B = \omega_{AB} \cdot OB\]
Мы знаем \(V_A = 2\) м/с и \(OA = R = 0.2\) м.
Тогда:
\[\omega_{AB} = \frac{V_A}{OA} = \frac{2 \text{ м/с}}{0.2 \text{ м}} = 10 \text{ рад/с}\]
Направление \(\omega_{AB}\): если \(V_A\) вниз, а \(O\) - центр, то \(\omega_{AB}\) должно быть по часовой стрелке.
Теперь найдем \(V_B\):
\[V_B = \omega_{AB} \cdot OB = 10 \text{ рад/с} \cdot 0.2 \text{ м} = 2 \text{ м/с}\]
Направление \(V_B\): если \(\omega_{AB}\) по часовой стрелке, а \(O\) - центр, то \(V_B\) будет направлена горизонтально вправо.
Теперь найдем \(\omega_{OB}\).
Стержень \(OB\) вращается вокруг точки \(O\).
Скорость точки \(B\) (как части стержня \(OB\)) равна \(V_B\).
\[V_B = \omega_{OB} \cdot OB\]
Мы нашли \(V_B = 2\) м/с и \(OB = R = 0.2\) м.
\[\omega_{OB} = \frac{V_B}{OB} = \frac{2 \text{ м/с}}{0.2 \text{ м}} = 10 \text{ рад/с}\]
Направление \(\omega_{OB}\): если \(V_B\) вправо, а \(O\) - центр, то \(\omega_{OB}\) должно быть по часовой стрелке.
Проверим углы.
В треугольнике \(OAB\), \(OA = OB = R\), угол \(AOB = 90^\circ\).
Углы при основании \(AB\) равны: \(\angle OAB = \angle OBA = 45^\circ\).
Скорость \(V_A\) направлена вертикально вниз.
Скорость \(V_B\) направлена горизонтально вправо.
Угловая скорость стержня \(AB\) относительно \(O\) (мгновенного центра) равна \(\omega_{AB}\).
Угловая скорость стержня \(OB\) относительно \(O\) равна \(\omega_{OB}\).
Все результаты совпадают.
Ответы:
Скорость точки \(B\):
\[V_B = 2 \text{ м/с}\]
Угловая скорость стержня \(AB\):
\[\omega_{AB} = 10 \text{ рад/с}\]
Угловая скорость стержня \(OB\):
\[\omega_{OB} = 10 \text{ рад/с}\]