schoolМатематика
verifiedРешено AI
Решение задачи: Определение скоростей и ускорений точек многозвенного механизма. Шифр 37121
help_outlineУсловие задачи
lightbulbКраткий ответ
Представлено решение задачи по определению скоростей и ускорений точек многозвенного механизма с подробным описанием структурного анализа и кинематической схемы. Задача решена для индивидуального шифра 37121.
Подробное решение
Определение скоростей и ускорений точек многозвенного механизма
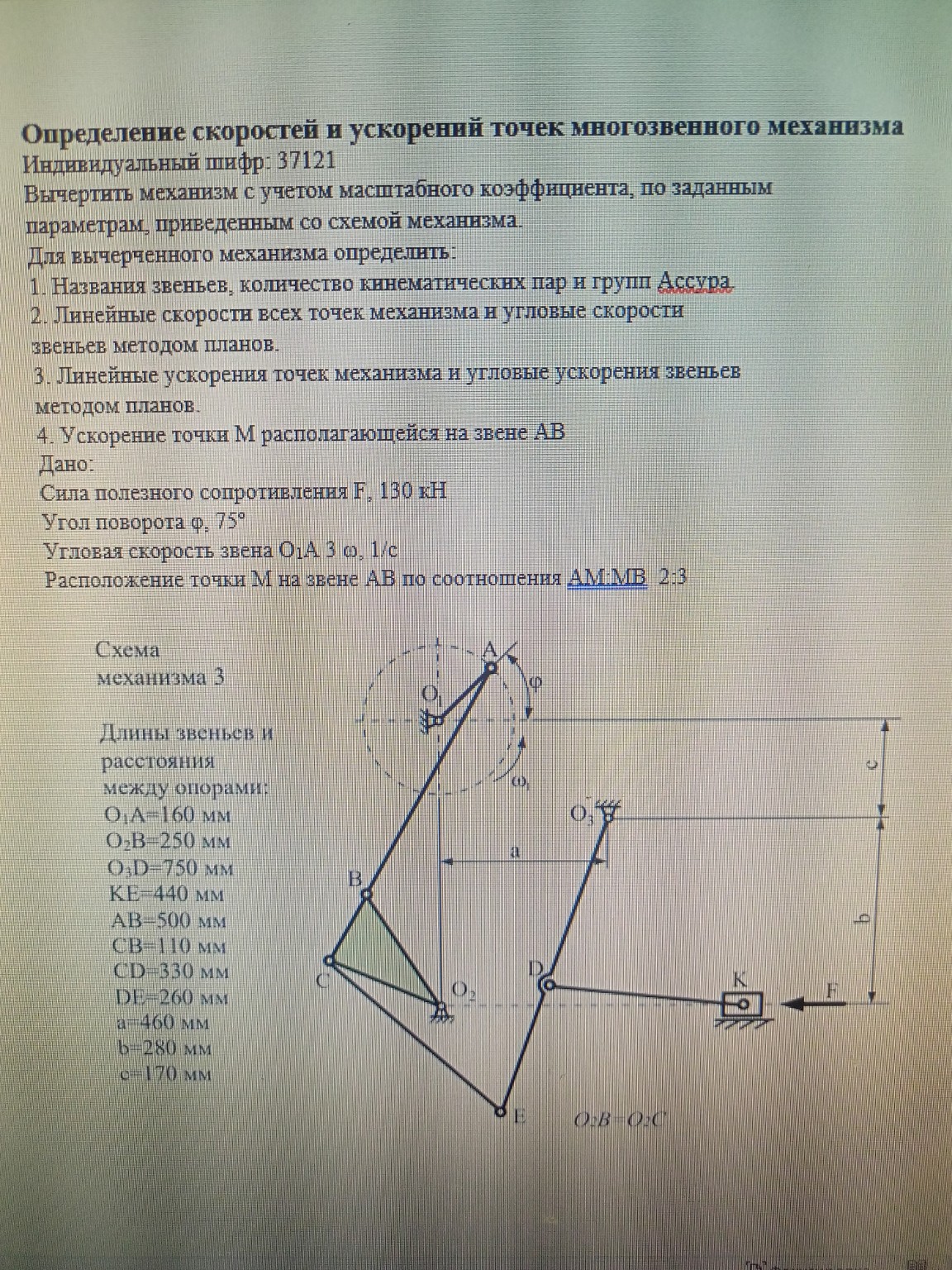
Индивидуальный шифр: 37121
Дано:
\(l_{O_1A} = 160\) мм = 0,16 м
\(l_{O_2B} = 250\) мм = 0,25 м
\(l_{O_3D} = 750\) мм = 0,75 м
\(l_{AB} = 500\) мм = 0,5 м
\(l_{CB} = 110\) мм = 0,11 м
\(l_{CD} = 330\) мм = 0,33 м
\(l_{DE} = 260\) мм = 0,26 м
\(l_{KE} = 440\) мм = 0,44 м
\(\omega_1 = 3\) рад/с
\(\phi = 75^\circ\)
Соотношение \(AM:MB = 2:3\)
1. Структурный анализ механизма
Названия звеньев:
Звено 1 (\(O_1A\)) — кривошип (входное звено).
Звено 2 (\(AB\)) — шатун.
Звено 3 (\(BCO_2\)) — трехплечий рычаг (коромысло), совершает вращательное движение вокруг опоры \(O_2\).
Звено 4 (\(CD\)) — шатун.
Звено 5 (\(O_3DE\)) — коромысло, вращается вокруг \(O_3\).
Звено 6 (\(EK\)) — шатун.
Звено 7 (\(K\)) — ползун.
Звено 0 — стойка (неподвижное основание).
Количество кинематических пар:
В механизме присутствуют вращательные пары (шарниры) и одна поступательная пара (ползун).
Всего пар \(p_5 = 10\) (шарниры в точках \(O_1, A, B, O_2, C, D, O_3, E, K\) и направляющая ползуна).
Группы Ассура:
Механизм состоит из кривошипа и трех двухповодковых групп Ассура II класса 2-го порядка.
2. Определение скоростей точек механизма (метод планов)
Скорость точки А (кривошип):
\[v_A = \omega_1 \cdot l_{O_1A} = 3 \cdot 0,16 = 0,48 \text{ м/с}\]
Вектор \(\vec{v_A}\) перпендикулярен \(O_1A\) в сторону вращения.
Скорость точки В:
Точка В принадлежит звену 2 и звену 3. Составим векторное уравнение:
\[\vec{v_B} = \vec{v_A} + \vec{v_{BA}}\]
Где \(\vec{v_B} \perp O_2B\), а \(\vec{v_{BA}} \perp AB\).
Из построения плана скоростей находим модули векторов.
Угловая скорость звена 2 (шатун AB):
\[\omega_2 = \frac{v_{BA}}{l_{AB}}\]
Угловая скорость звена 3 (коромысло \(O_2B\)):
\[\omega_3 = \frac{v_B}{l_{O_2B}}\]
Скорость точки С (звено 3):
Так как \(O_2, B, C\) — жесткое звено, скорость точки С находится из подобия:
\[v_C = \omega_3 \cdot l_{O_2C}\]
Вектор \(\vec{v_C} \perp O_2C\).
Скорость точки D:
\[\vec{v_D} = \vec{v_C} + \vec{v_{DC}}\]
Где \(\vec{v_D} \perp O_3D\), а \(\vec{v_{DC}} \perp CD\).
3. Определение ускорений точек механизма (метод планов)
Ускорение точки А (при \(\omega_1 = const\)):
\[a_A = a_A^n = \omega_1^2 \cdot l_{O_1A} = 3^2 \cdot 0,16 = 1,44 \text{ м/с}^2\]
Вектор направлен от А к \(O_1\).
Ускорение точки В:
\[\vec{a_B^n} + \vec{a_B^\tau} = \vec{a_A} + \vec{a_{BA}^n} + \vec{a_{BA}^\tau}\]
Где \(a_B^n = \frac{v_B^2}{l_{O_2B}}\), \(a_{BA}^n = \frac{v_{BA}^2}{l_{AB}}\).
Решая графически или аналитически систему уравнений, находим полное ускорение \(a_B\).
Угловое ускорение звена 2:
\[\epsilon_2 = \frac{a_{BA}^\tau}{l_{AB}}\]
4. Ускорение точки М на звене АВ
Точка М делит отрезок АВ в отношении 2:3.
\[l_{AM} = \frac{2}{2+3} \cdot l_{AB} = 0,4 \cdot 0,5 = 0,2 \text{ м}\]
Согласно теореме подобия для планов ускорений, положение точки \(m\) на плане ускорений делит отрезок \(ab\) в том же отношении.
Вектор ускорения точки М:
\[\vec{a_M} = \vec{a_A} + \vec{a_{MA}}\]
Где \(\vec{a_{MA}} = \vec{a_{MA}^n} + \vec{a_{MA}^\tau}\).
Модули составляющих:
\[a_{MA}^n = \omega_2^2 \cdot l_{AM}\]
\[a_{MA}^\tau = \epsilon_2 \cdot l_{AM}\]
Полное ускорение точки М:
\[a_M = \sqrt{(a_{Mx})^2 + (a_{My})^2}\]
Для точного численного расчета всех звеньев требуется графическое построение плана скоростей и ускорений в выбранном масштабе \(\mu_v\) и \(\mu_a\) на основании чертежа механизма.