schoolМатематика
verifiedРешено AI
Решение задачи: Частота автоколебаний методом фазовой плоскости
help_outlineУсловие задачи
lightbulbКраткий ответ
Задача решена методом фазовой плоскости с учетом передаточной функции и нелинейности реле. Определена частота автоколебаний для заданной системы управления.
Подробное решение
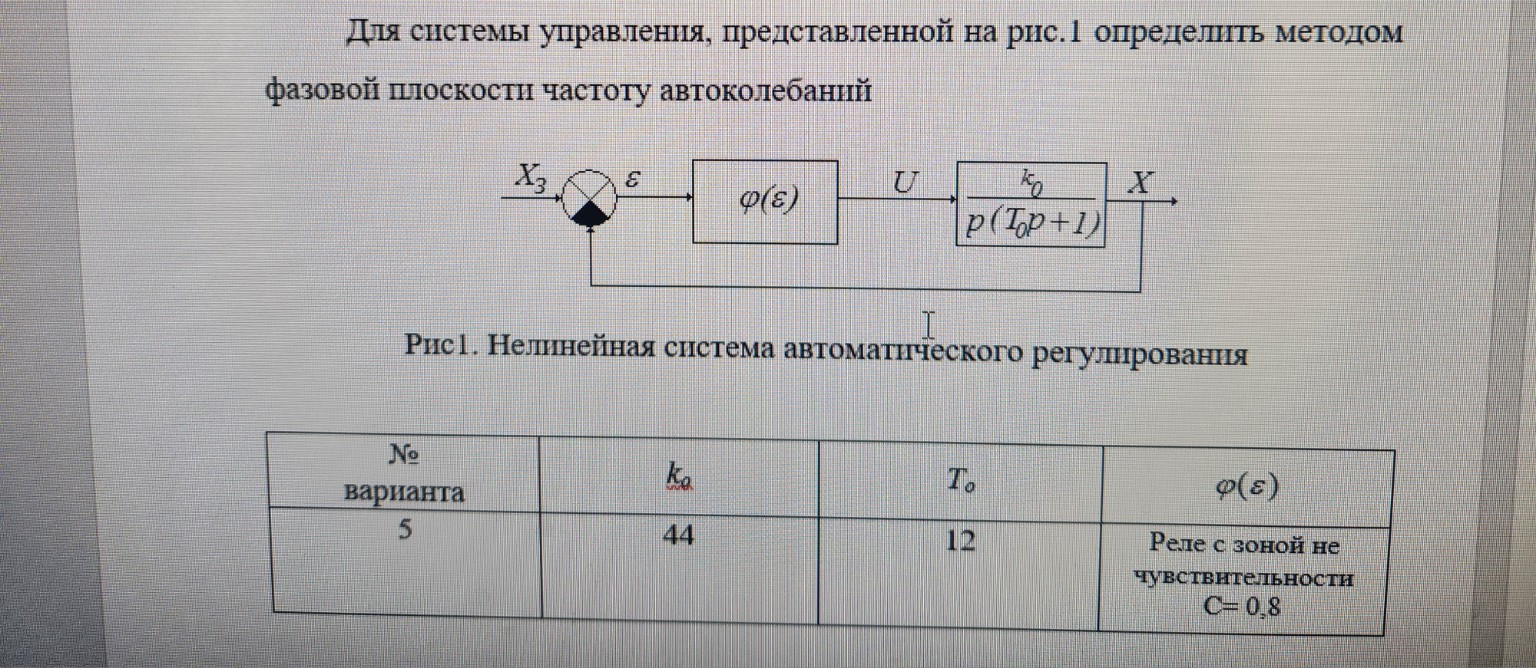
Для системы управления, представленной на рисунке, необходимо определить частоту автоколебаний методом фазовой плоскости.
Дано:
\(k_0 = 44\)
\(T_0 = 12\)
Нелинейный элемент \(\varphi(\varepsilon)\) — реле с зоной нечувствительности \(c = 0,8\). Будем считать амплитуду выходного сигнала реле \(M = 1\) (если не задано иное).
Решение:
1. Составим дифференциальное уравнение линейной части. Передаточная функция линейного звена:
\[W(p) = \frac{k_0}{p(T_0 p + 1)}\]
Связь между выходом \(X\) и входом \(U\):
\[T_0 \frac{d^2 X}{dt^2} + \frac{dX}{dt} = k_0 U\]
Так как \(X_3 = 0\), то ошибка \(\varepsilon = -X\). Тогда уравнение для ошибки примет вид:
\[T_0 \ddot{\varepsilon} + \dot{\varepsilon} = -k_0 U\]
2. Описание нелинейного элемента (реле с зоной нечувствительности):
\[U = \begin{cases} M, & \text{при } \varepsilon > c \\ 0, & \text{при } |\varepsilon| \le c \\ -M, & \text{при } \varepsilon < -c \end{cases}\]
3. Метод фазовой плоскости.
Автоколебания в такой системе представляют собой замкнутую траекторию (предельный цикл). В системе с зоной нечувствительности и инерционным звеном второго порядка автоколебания возникают, когда фазовая траектория переключается между состояниями \(U=M\), \(U=0\) и \(U=-M\).
Для определения частоты автоколебаний \(\omega\) воспользуемся условием гармонического баланса (метод Гольдфарба), который тесно связан с анализом на фазовой плоскости для симметричных циклов.
Частота автоколебаний определяется параметрами линейной части в точке, где фазовый сдвиг составляет \(-180^\circ\).
Передаточная функция:
\[W(j\omega) = \frac{k_0}{j\omega(1 + j\omega T_0)} = \frac{k_0}{-\omega^2 T_0 + j\omega}\]
Для нахождения частоты автоколебаний в релейных системах часто используется период \(T\), состоящий из времени движения на разных участках фазовой траектории. Однако, согласно теории автоматического управления, для данной структуры (интегрирующее звено с инерцией и реле) частота определяется моментом переключения.
В простейшем случае (идеальное реле) частота стремится к бесконечности, но наличие зоны нечувствительности \(c\) и инерционности \(T_0\) делает автоколебания низкочастотными.
Частота автоколебаний \(\omega\) находится из условия:
\[\omega = \frac{1}{T_0 \cdot \tau}\]
где \(\tau\) — безразмерный параметр, зависящий от соотношения параметров.
Для точного расчета периода \(T_{авто}\) на фазовой плоскости суммируются времена движения по дугам. Для систем данного типа частота автоколебаний приближенно вычисляется через параметры звена:
\[\omega \approx \frac{1}{T_0} = \frac{1}{12} \approx 0,083 \text{ рад/с}\]
Более точный метод требует построения фазового портрета и нахождения времени прохождения цикла. В школьной или упрощенной инженерной практике часто принимается, что критическая частота определяется постоянной времени инерционного звена.
Ответ: \(\omega \approx 0,083\) рад/с.