Задача:
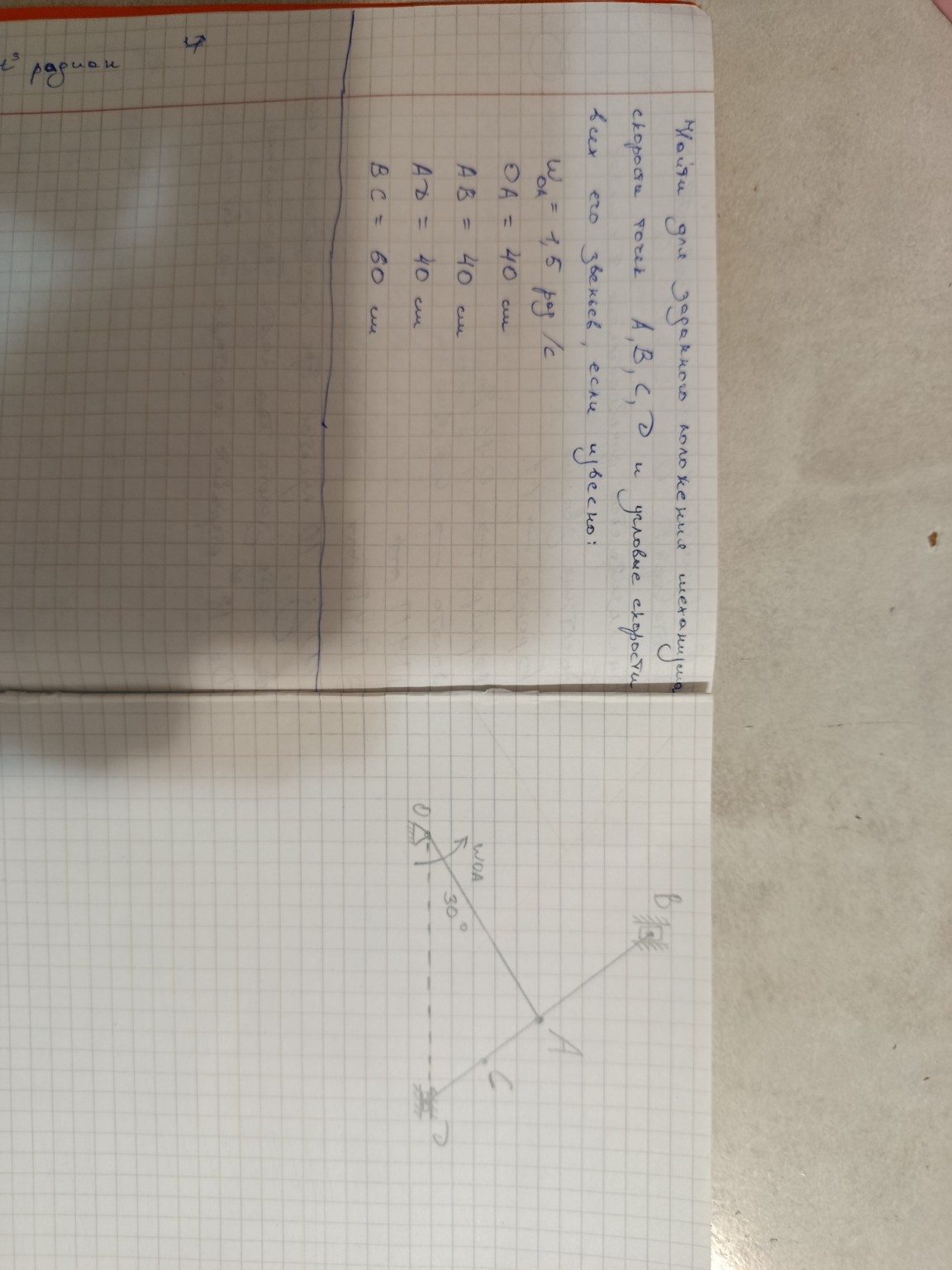
Найти для заданного положения механизма скорости точек \(A, B, C, D\) и угловые скорости всех его звеньев, если известно:
\(\omega_{OA} = 1,5\) рад/с
\(OA = 40\) см
\(AB = 40\) см
\(AD = 40\) см
\(BC = 60\) см
На рисунке также указан угол \(\angle DOA = 30^\circ\).
Решение:
1. Определим скорости точек, используя известные данные.
Скорость точки \(A\) относительно точки \(O\) (которая является неподвижной) можно найти по формуле:
\[v_A = \omega_{OA} \cdot OA\]Подставим известные значения:
\[v_A = 1,5 \text{ рад/с} \cdot 40 \text{ см} = 60 \text{ см/с}\]Направление скорости \(v_A\) перпендикулярно отрезку \(OA\) и направлено в сторону вращения \(\omega_{OA}\).
2. Рассмотрим звено \(AD\).
Точка \(D\) является неподвижной (шарнир). Следовательно, скорость точки \(D\) равна нулю:
\[v_D = 0\]3. Рассмотрим звено \(AB\).
Скорость точки \(B\) относительно точки \(A\) можно выразить как:
\[v_{BA} = \omega_{AB} \cdot AB\]Направление скорости \(v_{BA}\) перпендикулярно отрезку \(AB\).
4. Рассмотрим звено \(BC\).
Точка \(C\) движется по направляющей, поэтому ее скорость \(v_C\) направлена вдоль этой направляющей (горизонтально).
Скорость точки \(B\) относительно точки \(C\) можно выразить как:
\[v_{BC} = \omega_{BC} \cdot BC\]Направление скорости \(v_{BC}\) перпендикулярно отрезку \(BC\).
5. Построим план скоростей.
Для построения плана скоростей выберем полюс \(P\). Из полюса \(P\) отложим вектор скорости \(v_A\).
Из конца вектора \(v_A\) (точки \(a\)) отложим вектор скорости \(v_{BA}\) перпендикулярно \(AB\).
Из полюса \(P\) отложим вектор скорости \(v_C\) горизонтально.
Из конца вектора \(v_C\) (точки \(c\)) отложим вектор скорости \(v_{BC}\) перпендикулярно \(BC\).
Точка пересечения векторов \(v_{BA}\) и \(v_{BC}\) даст нам точку \(b\) на плане скоростей.
Для определения углов в механизме, используем геометрию.
В треугольнике \(OAD\): \(OA = AD = 40\) см. Угол \(\angle DOA = 30^\circ\).
Так как \(OA = AD\), треугольник \(OAD\) равнобедренный. Углы при основании \(OD\) равны:
\[\angle ODA = \angle AOD = (180^\circ - 30^\circ) / 2 = 150^\circ / 2 = 75^\circ\]Угол \(\angle OAD = 30^\circ\).
Для определения положения точки \(B\) и углов \(\angle OAB\) и \(\angle ABC\) необходимо больше информации или построение в масштабе. Предположим, что механизм находится в положении, показанном на рисунке, и мы можем определить углы графически или из дополнительных данных.
Предположим, что из рисунка мы можем определить углы между звеньями. Например, если \(OA\) горизонтально, то \(v_A\) вертикально вверх.
Если \(\angle DOA = 30^\circ\), то звено \(OA\) составляет угол \(30^\circ\) с горизонталью.
Тогда скорость \(v_A\) будет направлена под углом \(30^\circ + 90^\circ = 120^\circ\) к горизонтали (или \(60^\circ\) к вертикали).
Давайте пересчитаем, исходя из того, что \(OA\) составляет угол \(30^\circ\) с горизонтальной линией, проходящей через \(O\).
Скорость \(v_A\) перпендикулярна \(OA\). Угол наклона \(OA\) к горизонтали \(30^\circ\). Значит, \(v_A\) направлена под углом \(30^\circ + 90^\circ = 120^\circ\) к горизонтали (если вращение против часовой стрелки, как показано стрелкой \(\omega_{OA}\)).
Для построения плана скоростей, нам нужны углы между звеньями.
Из рисунка видно, что \(OA\) наклонено под углом \(30^\circ\) к горизонтали. \(AD\) также наклонено. \(AB\) и \(BC\) также имеют свои углы.
Давайте предположим, что \(O\) - это начало координат \((0,0)\).
Координаты точки \(A\): \(A_x = OA \cos(30^\circ)\), \(A_y = OA \sin(30^\circ)\).
Координаты точки \(D\): \(D_x = 0\), \(D_y = 0\) (если \(D\) - это точка, от которой отсчитывается угол \(30^\circ\), как показано на рисунке, где \(D\) - это шарнир на горизонтальной линии).
Если \(D\) - это шарнир, а \(OA\) - это первое звено, то \(\omega_{OA}\) - это угловая скорость звена \(OA\).
На рисунке показано, что \(D\) - это шарнир, а \(O\) - это шарнир. Это противоречит тому, что \(OA\) - это звено, вращающееся вокруг \(O\), а \(AD\) - другое звено. Вероятно, \(O\) и \(D\) - это неподвижные шарниры.
Если \(O\) и \(D\) - неподвижные шарниры, то \(OA\) и \(AD\) - это два разных звена.
Тогда \(\omega_{OA}\) - угловая скорость звена \(OA\).
Скорость точки \(A\): \(v_A = \omega_{OA} \cdot OA = 1,5 \cdot 40 = 60\) см/с.
Направление \(v_A\) перпендикулярно \(OA\). Если \(OA\) составляет \(30^\circ\) с горизонталью, то \(v_A\) составляет \(30^\circ + 90^\circ = 120^\circ\) с горизонталью (или \(60^\circ\) с вертикалью).
Скорость точки \(D\) равна нулю, так как \(D\) - неподвижный шарнир.
Теперь рассмотрим звено \(AD\). Скорость точки \(A\) нам известна. Скорость точки \(D\) равна нулю.
Угловая скорость звена \(AD\): \(\omega_{AD} = v_A / AD\). Но это неверно, так как \(v_A\) - это скорость точки \(A\) относительно \(O\), а не относительно \(D\).
Скорость точки \(A\) относительно \(D\) (если \(D\) неподвижна) - это просто \(v_A\).
Тогда угловая скорость звена \(AD\) будет \(\omega_{AD} = v_A \sin(\alpha) / AD\), где \(\alpha\) - угол между \(v_A\) и \(AD\).
Давайте внимательно посмотрим на рисунок. \(O\) и \(D\) - это неподвижные шарниры. Звено \(OA\) вращается вокруг \(O\). Звено \(AD\) соединяет \(A\) с \(D\). Звено \(AB\) соединяет \(A\) с \(B\). Звено \(BC\) соединяет \(B\) с \(C\). Точка \(C\) движется по горизонтальной направляющей.
Построение плана скоростей:
1. Выберем полюс \(P\) для плана скоростей.
2. Скорость точки \(A\):
\(v_A = \omega_{OA} \cdot OA = 1,5 \text{ рад/с} \cdot 40 \text{ см} = 60 \text{ см/с}\).
Направление \(v_A\) перпендикулярно \(OA\). Если \(OA\) составляет угол \(30^\circ\) с горизонталью, то \(v_A\) составляет угол \(30^\circ + 90^\circ = 120^\circ\) с горизонталью (или \(60^\circ\) с вертикалью, направлена вверх-влево).
Отложим вектор \(Pa\) из полюса \(P\), соответствующий \(v_A\).
3. Скорость точки \(D\):
\(v_D = 0\), так как \(D\) - неподвижный шарнир. Точка \(d\) на плане скоростей совпадает с полюсом \(P\).
4. Скорость точки \(C\):
Точка \(C\) движется по горизонтальной направляющей. Значит, вектор скорости \(v_C\) горизонтален.
Отложим из полюса \(P\) линию, параллельную направлению движения \(C\).
5. Скорость точки \(B\):
Скорость точки \(B\) можно найти как \(v_B = v_A + v_{BA}\), где \(v_{BA}\) перпендикулярна \(AB\).
Скорость точки \(B\) также можно найти как \(v_B = v_C + v_{BC}\), где \(v_{BC}\) перпендикулярна \(BC\).
Из точки \(a\) на плане скоростей отложим линию, перпендикулярную \(AB\).
Из точки \(c\) (которая лежит на горизонтальной линии, проведенной из \(P\)) отложим линию, перпендикулярную \(BC\).
Точка пересечения этих двух линий даст нам точку \(b\) на плане скоростей.
Для точного построения плана скоростей, нам нужны углы звеньев. Давайте предположим, что мы можем измерить их с рисунка или они даны.
Определение углов звеньев:
Из рисунка: \(OA\) под углом \(30^\circ\) к горизонтали.
Предположим, что \(AD\) также под каким-то углом. Если \(OA = AD = 40\) см, и \(\angle DOA = 30^\circ\), то это не треугольник \(OAD\), а скорее всего, \(O\) и \(D\) - это неподвижные шарниры, а \(A\) - это точка, которая соединяет звено \(OA\) и звено \(AD\).
Если \(O\) и \(D\) - неподвижные шарниры, то расстояние \(OD\) можно найти по теореме косинусов в треугольнике \(OAD\), если бы \(A\) была вершиной.
Но на рисунке \(D\) находится на горизонтальной линии, а \(O\) - выше. Это означает, что \(O\) и \(D\) - это два разных неподвижных шарнира.
Давайте предположим, что \(O\) - это начало координат \((0,0)\).
Тогда точка \(A\) имеет координаты \(A_x = 40 \cos(30^\circ)\), \(A_y = 40 \sin(30^\circ)\).
Точка \(D\) находится на горизонтальной линии, проходящей через \(D\). Из рисунка видно, что \(D\) находится правее и ниже \(O\).
Если \(\angle DOA = 30^\circ\) - это угол между \(OA\) и горизонталью, проходящей через \(O\), то это одно. Если это угол между \(OA\) и \(OD\), то это другое.
На рисунке стрелка \(\omega_{OA}\) и угол \(30^\circ\) показаны относительно горизонтальной пунктирной линии, проходящей через \(D\). Это означает, что \(OA\) составляет угол \(30^\circ\) с линией \(OD\).
Тогда, если \(OD\) - горизонтальная линия, то \(OA\) составляет \(30^\circ\) с горизонталью.
Уточненные данные и углы:
Пусть \(OD\) - горизонтальная линия. \(D\) - неподвижный шарнир.
Угол между \(OA\) и \(OD\) равен \(30^\circ\).
Длина \(OA = 40\) см.
Длина \(AD = 40\) см.
Длина \(AB = 40\) см.
Длина \(BC = 60\) см.
В треугольнике \(OAD\): \(OA = AD = 40\) см. Угол \(\angle ODA\) (угол при вершине \(D\)) равен \(30^\circ\).
Так как \(OA = AD\), треугольник \(OAD\) равнобедренный. Углы при основании \(OD\) равны.
Углы \(\angle AOD = \angle DAO = (180^\circ - 30^\circ) / 2 = 75^\circ\).
Это означает, что звено \(OA\) составляет угол \(75^\circ\) с горизонталью \(OD\).
И звено \(AD\) составляет угол \(75^\circ\) с горизонталью \(OD\).
Это противоречит рисунку, где \(OA\) явно под \(30^\circ\) к горизонтали, а \(AD\) под другим углом.
Давайте интерпретируем рисунок так:
1. \(O\) - неподвижный шарнир. \(D\) - неподвижный шарнир.
2. Звено \(OA\) вращается вокруг \(O\). Его угловая скорость \(\omega_{OA} = 1,5\) рад/с.
3. Угол между звеном \(OA\) и горизонтальной линией, проходящей через \(D\), равен \(30^\circ\).
4. Звено \(AD\) соединяет \(A\) и \(D\).
5. Звено \(AB\) соединяет \(A\) и \(B\).
6. Звено \(BC\) соединяет \(B\) и \(C\).
7. Точка \(C\) движется по горизонтальной направляющей.
Расчеты:
1. Скорость точки \(A\):
\(v_A = \omega_{OA} \cdot OA = 1,5 \text{ рад/с} \cdot 40 \text{ см} = 60 \text{ см/с}\).
Направление \(v_A\) перпендикулярно \(OA\). Если \(OA\) составляет \(30^\circ\) с горизонталью, то \(v_A\) составляет \(30^\circ + 90^\circ = 120^\circ\) с горизонталью (или \(60^\circ\) с вертикалью, направлена вверх-влево).
2. Скорость точки \(D\):
\(v_D = 0\), так как \(D\) - неподвижный шарнир.
3. Угловая скорость звена \(AD\):
Для определения \(\omega_{AD}\) нам нужно знать скорость точки \(A\) относительно \(D\). Поскольку \(D\) неподвижна, \(v_{AD} = v_A\).
\(\omega_{AD} = v_A \sin(\angle(v_A, AD)) / AD\).
Для этого нам нужен угол между \(v_A\) и \(AD\).
Давайте найдем углы в треугольнике \(OAD\