Задача
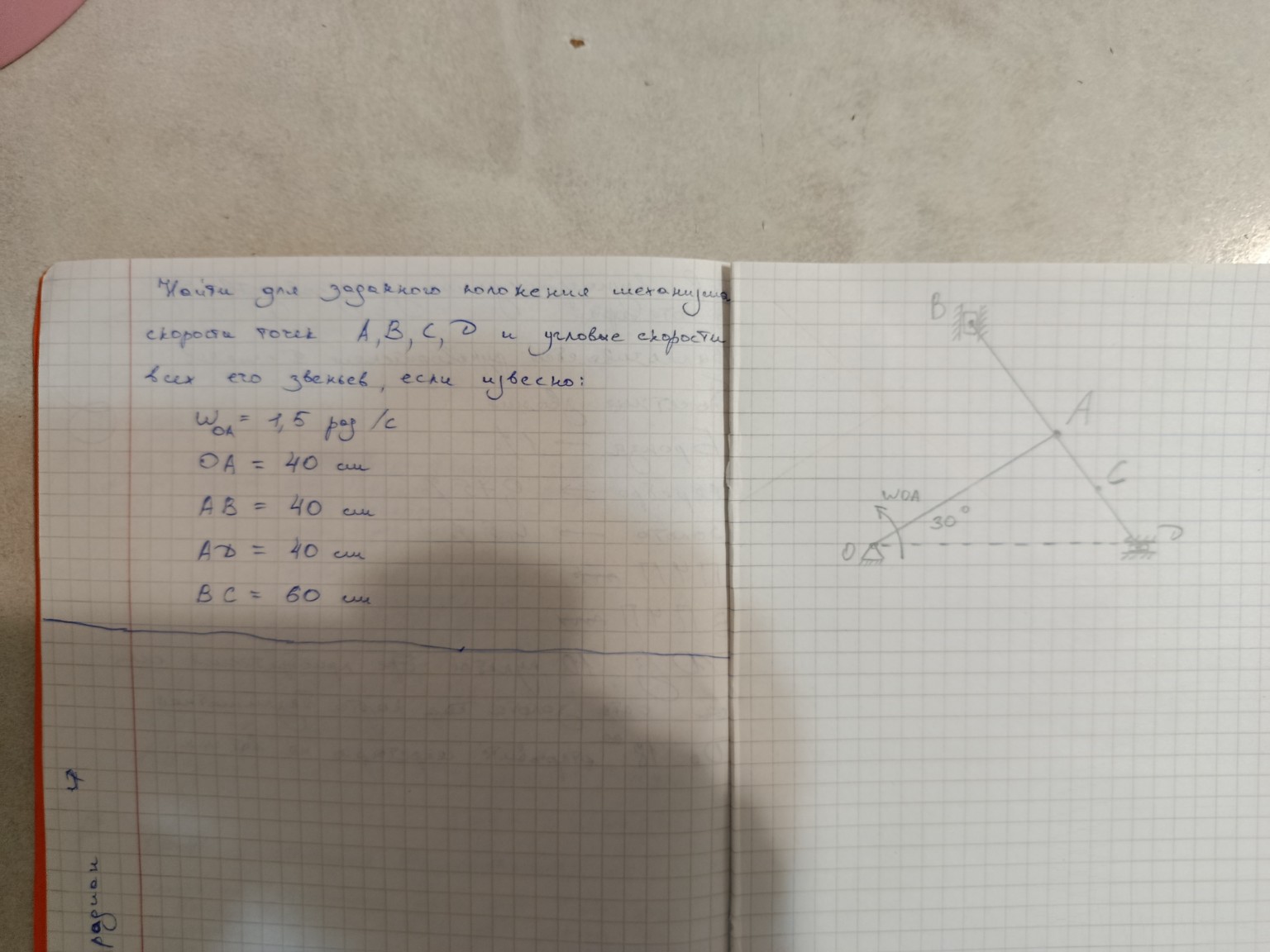
Найти для заданного положения механизма скорости точек \(A, B, C, D\) и угловые скорости всех его звеньев, если известно: \[\omega_{OA} = 1.5 \text{ рад/с}\] \[OA = 40 \text{ см}\] \[AB = 40 \text{ см}\] \[AD = 40 \text{ см}\] \[BC = 60 \text{ см}\] Угол между звеном \(OA\) и горизонтальной линией \(OD\) равен \(30^\circ\).Решение
1. Определим скорости точки A.
Точка \(A\) принадлежит звену \(OA\), которое вращается вокруг неподвижной точки \(O\). Скорость точки \(A\) можно найти по формуле: \[V_A = \omega_{OA} \cdot OA\] Подставим известные значения: \[V_A = 1.5 \text{ рад/с} \cdot 40 \text{ см} = 60 \text{ см/с}\] Направление скорости \(V_A\) перпендикулярно звену \(OA\) и направлено в сторону вращения \(\omega_{OA}\).2. Определим скорости точки D.
Точка \(D\) является неподвижной опорой, поэтому её скорость равна нулю: \[V_D = 0\]3. Определим скорости точки B.
Точка \(B\) является ползуном, который движется вдоль вертикальной направляющей. Следовательно, скорость \(V_B\) направлена строго вертикально.4. Определим скорости точки C.
Точка \(C\) является ползуном, который движется вдоль горизонтальной направляющей. Следовательно, скорость \(V_C\) направлена строго горизонтально.5. Построение плана скоростей.
Для определения остальных скоростей и угловых скоростей звеньев воспользуемся методом плана скоростей.5.1. Выберем полюс плана скоростей.
Обозначим полюс плана скоростей буквой \(p\). Поскольку точки \(O\) и \(D\) неподвижны, их изображения на плане скоростей совпадают с полюсом \(p\). \[p_O \equiv p_D \equiv p\]5.2. Построим вектор скорости \(V_A\).
Из полюса \(p\) отложим вектор \(p_a\), соответствующий скорости \(V_A\). Длина вектора \(p_a\) будет пропорциональна \(V_A\). Направление вектора \(p_a\) перпендикулярно \(OA\) и составляет угол \(30^\circ + 90^\circ = 120^\circ\) с горизонталью (или \(90^\circ - 30^\circ = 60^\circ\) с вертикалью). Масштаб плана скоростей выберем, например, \(1 \text{ см} = 10 \text{ см/с}\). Тогда длина вектора \(p_a\) будет \(60 \text{ см/с} / 10 \text{ см/с/см} = 6 \text{ см}\).5.3. Определим положение точки \(b\) на плане скоростей.
Точка \(B\) принадлежит звену \(AB\). Скорость точки \(B\) относительно \(A\) направлена перпендикулярно \(AB\). На плане скоростей это означает, что вектор \(a_b\) перпендикулярен \(AB\). Также мы знаем, что скорость \(V_B\) направлена строго вертикально. Это означает, что вектор \(p_b\) на плане скоростей будет вертикальным. Из точки \(a\) на плане скоростей проведем линию, перпендикулярную \(AB\). Из полюса \(p\) проведем вертикальную линию. Пересечение этих двух линий даст нам точку \(b\) на плане скоростей.5.4. Определим положение точки \(c\) на плане скоростей.
Точка \(C\) принадлежит звену \(BC\). Скорость точки \(C\) относительно \(B\) направлена перпендикулярно \(BC\). На плане скоростей это означает, что вектор \(b_c\) перпендикулярен \(BC\). Также мы знаем, что скорость \(V_C\) направлена строго горизонтально. Это означает, что вектор \(p_c\) на плане скоростей будет горизонтальным. Из точки \(b\) на плане скоростей проведем линию, перпендикулярную \(BC\). Из полюса \(p\) проведем горизонтальную линию. Пересечение этих двух линий даст нам точку \(c\) на плане скоростей.5.5. Измерение скоростей на плане.
После построения плана скоростей, измеряем длины векторов \(p_b\) и \(p_c\). \[V_B = \text{длина } p_b \cdot \text{масштаб}\] \[V_C = \text{длина } p_c \cdot \text{масштаб}\]6. Расчет угловых скоростей звеньев.
6.1. Угловая скорость звена \(AB\).
Угловая скорость звена \(AB\) определяется относительной скоростью точек \(B\) и \(A\): \[\omega_{AB} = \frac{V_{BA}}{AB} = \frac{\text{длина } a_b \cdot \text{масштаб}}{AB}\] Направление \(\omega_{AB}\) определяется направлением вектора \(a_b\) относительно \(AB\). Если \(a_b\) направлен так, что вращение происходит против часовой стрелки, то \(\omega_{AB}\) положительна.6.2. Угловая скорость звена \(BC\).
Угловая скорость звена \(BC\) определяется относительной скоростью точек \(C\) и \(B\): \[\omega_{BC} = \frac{V_{CB}}{BC} = \frac{\text{длина } b_c \cdot \text{масштаб}}{BC}\] Направление \(\omega_{BC}\) определяется направлением вектора \(b_c\) относительно \(BC\).6.3. Угловая скорость звена \(AD\).
Звено \(AD\) является шатуном, соединяющим точку \(A\) с ползуном \(C\). Однако, в данном механизме точка \(D\) является неподвижной опорой, а точка \(C\) движется горизонтально. Звено \(AD\) не является отдельным звеном, а скорее частью конструкции. Если под \(AD\) подразумевается расстояние между точками \(A\) и \(D\), то это не звено, а просто расстояние. Если же это звено, то оно должно быть соединено с ползуном \(C\). Судя по рисунку, \(AD\) - это расстояние между точкой \(A\) и неподвижной опорой \(D\). В таком случае, это не отдельное звено, а часть неподвижной рамы. Однако, если \(AD\) - это звено, соединяющее \(A\) с ползуном \(C\), то это противоречит обозначению \(D\) как неподвижной опоры. Предположим, что \(AD\) - это звено, соединяющее точку \(A\) с ползуном \(C\), и точка \(D\) на рисунке - это просто обозначение горизонтальной линии, по которой движется ползун \(C\). Но тогда \(D\) не является неподвижной опорой. Давайте перечитаем условие: "скорости точек \(A, B, C, D\)". Если \(D\) - это точка, то она должна иметь скорость. Но на рисунке \(D\) обозначена как неподвижная опора. Исходя из рисунка, \(D\) - это неподвижная опора, а \(C\) - ползун, движущийся по горизонтальной направляющей, проходящей через \(D\). Тогда звено \(AD\) не существует как отдельное звено. Возможно, имелось в виду звено \(AC\)? Или \(CD\)? Если \(AD\) - это расстояние от \(A\) до \(D\), то это просто длина. Давайте предположим, что \(AD\) - это длина отрезка, а не звено. Тогда у нас есть звенья \(OA\), \(AB\), \(BC\).7. Уточнение геометрии механизма.
Для построения плана скоростей необходимо знать углы звеньев. Угол звена \(OA\) с горизонталью \(30^\circ\). Длина \(OA = 40 \text{ см}\). Длина \(AD = 40 \text{ см}\). Это означает, что треугольник \(OAD\) равнобедренный, если \(D\) - это точка на горизонтали. Координаты точки \(A\): \[x_A = OA \cos(30^\circ) = 40 \cdot \frac{\sqrt{3}}{2} = 20\sqrt{3} \approx 34.64 \text{ см}\] \[y_A = OA \sin(30^\circ) = 40 \cdot \frac{1}{2} = 20 \text{ см}\] Координаты точки \(D\): \(x_D = 40 \text{ см}\), \(y_D = 0\). Это означает, что точка \(D\) находится на расстоянии \(40 \text{ см}\) от \(O\) по горизонтали. Тогда \(x_A = 20\sqrt{3} \approx 34.64 \text{ см}\). Расстояние от \(A\) до \(D\) по горизонтали: \(x_D - x_A = 40 - 20\sqrt{3} \approx 40 - 34.64 = 5.36 \text{ см}\). Расстояние \(AD\) по прямой: \[AD = \sqrt{(x_D - x_A)^2 + (y_D - y_A)^2} = \sqrt{(40 - 20\sqrt{3})^2 + (0 - 20)^2}\] \[AD = \sqrt{(5.36)^2 + (-20)^2} = \sqrt{28.73 + 400} = \sqrt{428.73} \approx 20.7 \text{ см}\] Но по условию \(AD = 40 \text{ см}\). Это противоречие.Переосмысление условия и рисунка.
Возможно, \(AD\) - это не расстояние от \(A\) до \(D\), а длина звена \(AD\), которое соединяет \(A\) с ползуном \(C\), а точка \(D\) на рисунке - это просто обозначение горизонтальной направляющей. Но тогда \(D\) не является точкой механизма, скорость которой нужно найти. Давайте предположим, что \(D\) - это неподвижная опора, как показано на рисунке. И \(AD\) - это длина отрезка, а не звена. Тогда условие \(AD = 40 \text{ см}\) должно быть согласовано с геометрией. Если \(D\) - это точка на горизонтали, и \(OD\) - это горизонтальная линия, то \(D\) находится на расстоянии \(OD\) от \(O\). На рисунке показано, что \(D\) - это неподвижная опора, расположенная на горизонтальной линии, проходящей через \(O\). Если \(AD = 40 \text{ см}\), и \(OA = 40 \text{ см}\), и угол \(OAD\) - это угол между \(OA\) и \(AD\). Если \(D\) - это точка на горизонтальной линии, то треугольник \(OAD\) имеет стороны \(OA=40\), \(AD=40\). Угол \(AOD = 30^\circ\). По теореме косинусов для треугольника \(OAD\): \[AD^2 = OA^2 + OD^2 - 2 \cdot OA \cdot OD \cdot \cos(30^\circ)\] \[40^2 = 40^2 + OD^2 - 2 \cdot 40 \cdot OD \cdot \frac{\sqrt{3}}{2}\] \[1600 = 1600 + OD^2 - 40\sqrt{3} \cdot OD\] \[OD^2 - 40\sqrt{3} \cdot OD = 0\] \[OD(OD - 40\sqrt{3}) = 0\] Отсюда \(OD = 0\) (что невозможно) или \(OD = 40\sqrt{3} \approx 69.28 \text{ см}\). Значит, если \(D\) - это неподвижная опора на горизонтали, то расстояние \(OD\) должно быть \(40\sqrt{3} \text{ см}\). Но на рисунке \(D\) находится на горизонтальной линии, и \(C\) - ползун, движущийся по этой линии. Давайте предположим, что \(D\) - это точка, через которую проходит горизонтальная направляющая для ползуна \(C\). И \(D\) - это неподвижная опора. Тогда \(V_D = 0\). И \(AD = 40 \text{ см}\) - это длина звена \(AD\). Но на рисунке нет звена \(AD\). На рисунке есть звено \(OA\), звено \(AB\), звено \(BC\). И ползун \(B\) движется по вертикальной направляющей. И ползун \(C\) движется по горизонтальной направляющей. И \(D\) - это неподвижная опора на горизонтальной направляющей.Давайте еще раз внимательно посмотрим на рисунок и условие.
Механизм состоит из: 1. Кривошипа \(OA\), вращающегося вокруг \(O\). 2. Шатуна \(AB\). 3. Ползуна \(B\), движущегося по вертикальной направляющей. 4. Шатуна \(AC\). (На рисунке показано звено \(AC\), а не \(BC\)). 5. Ползуна \(C\), движущегося по горизонтальной направляющей, проходящей через неподвижную точку \(D\). Если это так, то условие \(BC = 60 \text{ см}\) не соответствует рисунку, где показано звено \(AC\). И условие \(AD = 40 \text{ см}\) также не соответствует рисунку, где нет звена \(AD\).Предположим, что условие и рисунок описывают один и тот же механизм, но с некоторыми неточностями в обозначениях.
Давайте исходить из того, что на рисунке изображен механизм: - Кривошип \(OA\). - Шатун \(AB\). - Ползун \(B\), движущийся по вертикальной направляющей. - Шатун \(AC\). - Ползун \(C\), движущийся по горизонтальной направляющей, проходящей через неподвижную точку \(D\). Тогда данные: \[\omega_{OA} = 1.5 \text{ рад/с}\] \[OA = 40 \text{ см}\] \[AB = 40 \text{ см}\] \[AD = 40 \text{ см}\] (Если это длина звена \(AC\), то \(AC = 40 \text{ см}\)) \[BC = 60 \text{ см}\] (Если это длина звена \(BC\), то это противоречит рисунку, где звено \(AC\))Давайте сделаем предположение, что в условии опечатка, и вместо \(AD\) и \(BC\) должны быть длины звеньев, которые есть на рисунке.
На рисунке есть звенья \(OA\), \(AB\), \(AC\). Тогда, возможно, \(AD = 40 \text{ см}\) относится к длине \(AC\), то есть \(AC = 40 \text{ см}\). И \(BC = 60 \text{ см}\) - это опечатка, и это не звено.Давайте решим задачу, исходя из того, что на рисунке изображен механизм:
1. Кривошип \(OA\). 2. Шатун \(AB\). 3. Ползун \(B\), движущийся по вертикальной направляющей. 4. Шатун \(AC\). 5. Ползун \(C\), движущийся по горизонтальной направляющей, проходящей через неподвижную точку \(D\). И данные: \[\omega_{OA} = 1.5 \text{ рад/с}\] \[OA = 40 \text{ см}\]