Решение задачи
Дано:
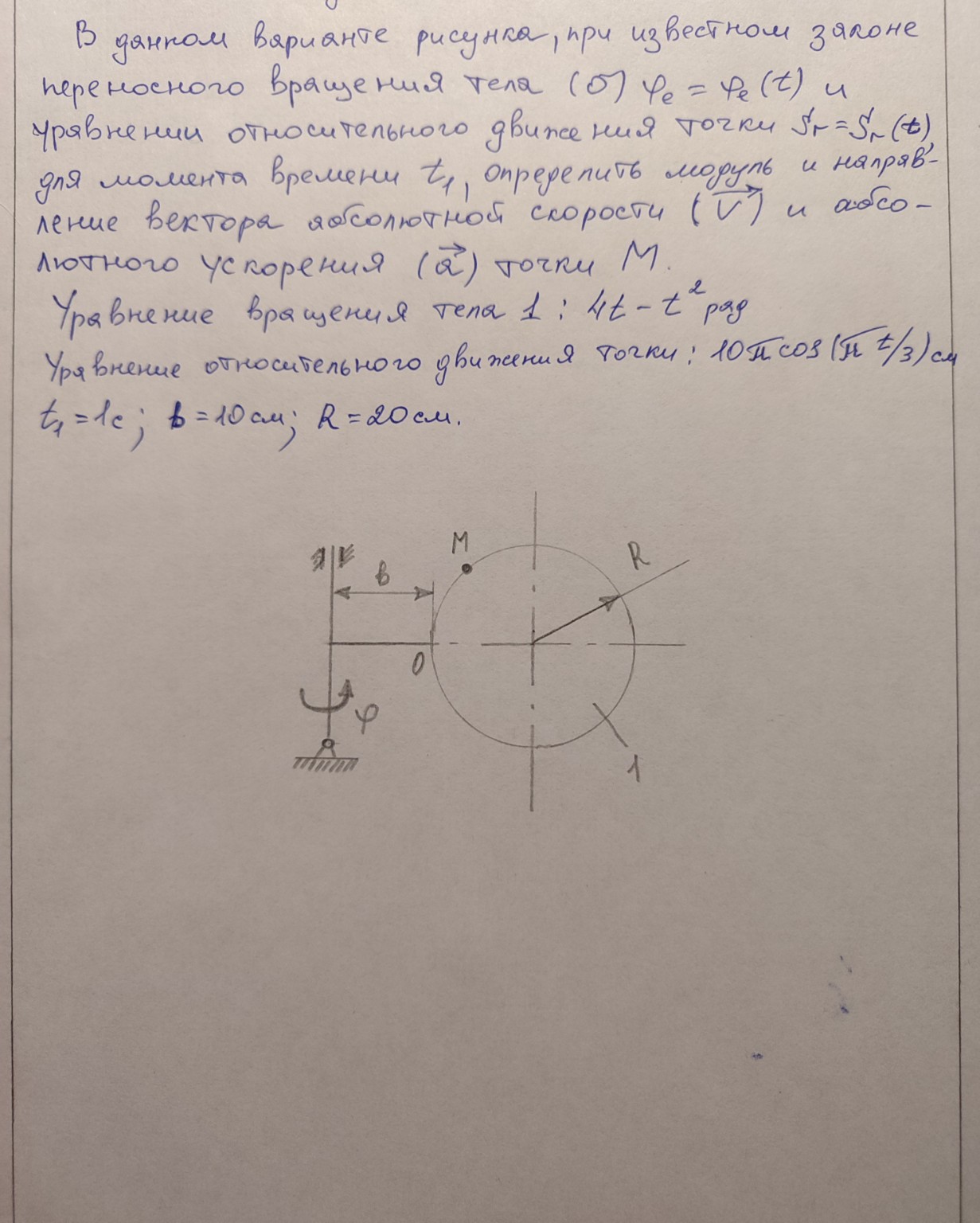
- Уравнение переносного вращения тела (0): \( \varphi_e = \varphi_e(t) \)
- Уравнение относительного движения точки: \( S_r = S_r(t) \)
- Уравнение вращения тела 1: \( \varphi = 4t - t^2 \) рад
- Уравнение относительного движения точки M: \( S_r = 10\pi \cos(\pi t/3) \) см
- Момент времени: \( t_1 = 1 \) с
- Расстояние: \( b = 10 \) см
- Радиус: \( R = 20 \) см
Найти:
- Модуль и направление вектора абсолютной скорости \( \vec{V} \) точки M
- Модуль и направление вектора абсолютного ускорения \( \vec{a} \) точки M
1. Определим параметры движения в заданный момент времени \( t_1 = 1 \) с.
1.1. Переносное движение (вращение тела 0):
Угол поворота тела 0: \( \varphi_e = \varphi = 4t - t^2 \)
При \( t_1 = 1 \) с:
\[ \varphi_e(1) = 4(1) - (1)^2 = 4 - 1 = 3 \text{ рад} \]Переносная угловая скорость:
\[ \omega_e = \frac{d\varphi_e}{dt} = \frac{d}{dt}(4t - t^2) = 4 - 2t \]При \( t_1 = 1 \) с:
\[ \omega_e(1) = 4 - 2(1) = 2 \text{ рад/с} \]Переносное угловое ускорение:
\[ \varepsilon_e = \frac{d\omega_e}{dt} = \frac{d}{dt}(4 - 2t) = -2 \text{ рад/с}^2 \]При \( t_1 = 1 \) с:
\[ \varepsilon_e(1) = -2 \text{ рад/с}^2 \]1.2. Относительное движение (движение точки M по окружности):
Расстояние от центра окружности до точки M: \( S_r = 10\pi \cos(\pi t/3) \) см
При \( t_1 = 1 \) с:
\[ S_r(1) = 10\pi \cos(\pi (1)/3) = 10\pi \cos(\pi/3) = 10\pi \cdot \frac{1}{2} = 5\pi \text{ см} \]Относительная скорость:
\[ V_r = \frac{dS_r}{dt} = \frac{d}{dt}(10\pi \cos(\pi t/3)) = 10\pi \left(-\sin(\frac{\pi t}{3})\right) \cdot \frac{\pi}{3} = -\frac{10\pi^2}{3} \sin(\frac{\pi t}{3}) \]При \( t_1 = 1 \) с:
\[ V_r(1) = -\frac{10\pi^2}{3} \sin(\frac{\pi}{3}) = -\frac{10\pi^2}{3} \cdot \frac{\sqrt{3}}{2} = -\frac{5\pi^2\sqrt{3}}{3} \text{ см/с} \]Относительное ускорение:
\[ a_r = \frac{dV_r}{dt} = \frac{d}{dt}\left(-\frac{10\pi^2}{3} \sin(\frac{\pi t}{3})\right) = -\frac{10\pi^2}{3} \left(\cos(\frac{\pi t}{3})\right) \cdot \frac{\pi}{3} = -\frac{10\pi^3}{9} \cos(\frac{\pi t}{3}) \]При \( t_1 = 1 \) с:
\[ a_r(1) = -\frac{10\pi^3}{9} \cos(\frac{\pi}{3}) = -\frac{10\pi^3}{9} \cdot \frac{1}{2} = -\frac{5\pi^3}{9} \text{ см/с}^2 \]2. Определим абсолютную скорость точки M.
Формула для абсолютной скорости:
\[ \vec{V} = \vec{V}_e + \vec{V}_r \]где \( \vec{V}_e \) - переносная скорость, \( \vec{V}_r \) - относительная скорость.
2.1. Переносная скорость \( \vec{V}_e \):
Точка M находится на расстоянии \( R \) от центра вращения тела 1. Центр вращения тела 1 находится на расстоянии \( b \) от оси вращения тела 0.
Радиус вращения точки M относительно оси вращения тела 0: \( R_e = b + R \)
При \( b = 10 \) см и \( R = 20 \) см:
\[ R_e = 10 + 20 = 30 \text{ см} \]Модуль переносной скорости:
\[ V_e = \omega_e R_e \]При \( \omega_e = 2 \) рад/с и \( R_e = 30 \) см:
\[ V_e = 2 \cdot 30 = 60 \text{ см/с} \]Направление \( \vec{V}_e \) перпендикулярно радиусу \( R_e \) и направлено по касательной к траектории переносного движения (окружности).
2.2. Относительная скорость \( \vec{V}_r \):
Модуль относительной скорости: \( V_r = -\frac{5\pi^2\sqrt{3}}{3} \text{ см/с} \)
Знак минус указывает на то, что точка M движется в сторону уменьшения \( S_r \). На рисунке \( S_r \) отсчитывается от центра окружности, и точка M движется по окружности. Если \( S_r \) - это расстояние от центра, то \( V_r \) - это скорость изменения этого расстояния. Однако, из рисунка видно, что \( S_r \) - это скорее всего угловое положение или дуговая координата, а не расстояние от центра. Давайте предположим, что \( S_r \) - это координата вдоль радиуса, то есть точка M движется по радиусу. Но это противоречит тому, что M находится на окружности радиуса R.
Давайте перечитаем условие: "Уравнение относительного движения точки: \( S_r = S_r(t) \)". На рисунке точка M находится на окружности радиуса R. Если \( S_r \) - это координата вдоль радиуса, то \( R \) должно быть переменным. Если \( S_r \) - это дуговая координата, то \( V_r \) - это тангенциальная скорость.
Предположим, что \( S_r \) - это расстояние от центра окружности, по которой движется точка M, до самой точки M. Тогда \( R \) в условии задачи - это не радиус окружности, а некая константа. Но это нелогично.
Наиболее вероятное толкование: \( S_r \) - это угловая координата точки M относительно радиуса, который вращается вместе с телом 1. То есть, \( S_r \) - это угол, а не расстояние. Но тогда единицы измерения не сходятся (см).
Давайте предположим, что \( S_r \) - это расстояние от центра окружности до точки M, и это расстояние меняется. Тогда \( R \) в условии задачи - это не радиус, а некая константа, которая не используется в уравнении \( S_r \).
Если \( S_r \) - это расстояние от центра окружности до точки M, то \( V_r \) - это радиальная скорость.
Давайте предположим, что \( S_r \) - это дуговая координата точки M по окружности радиуса R. Тогда \( S_r = R \cdot \theta_r \), где \( \theta_r \) - относительный угол.
Тогда \( V_r = \frac{dS_r}{dt} \). Направление \( \vec{V}_r \) будет по касательной к окружности, по которой движется точка M относительно тела 1.
Давайте пересмотрим рисунок. Точка M находится на окружности радиуса R. Относительное движение точки M, скорее всего, происходит по этой окружности. \( S_r \) - это, вероятно, дуговая координата.
Тогда \( V_r = -\frac{5\pi^2\sqrt{3}}{3} \text{ см/с} \). Направление \( \vec{V}_r \) по касательной к окружности радиуса R. Знак минус означает, что движение происходит против часовой стрелки, если положительное направление \( S_r \) отсчитывается по часовой стрелке.
2.3. Абсолютная скорость \( \vec{V} \):
Для определения абсолютной скорости нам нужно знать угол между \( \vec{V}_e \) и \( \vec{V}_r \).
Переносная скорость \( \vec{V}_e \) направлена по касательной к окружности радиуса \( R_e = 30 \) см. Относительная скорость \( \vec{V}_r \) направлена по касательной к окружности радиуса \( R = 20 \) см. Эти две окружности имеют разные центры.
На рисунке видно, что точка M находится на окружности, которая вращается вокруг точки O. Точка O, в свою очередь, вращается вокруг неподвижной оси.
Давайте уточним систему координат. Пусть неподвижная система координат имеет начало в точке вращения тела 0. Ось X направлена вправо, ось Y - вверх.
Положение центра окружности, по которой движется M, относительно неподвижной оси: \( x_c = b \cos \varphi_e \), \( y_c = b \sin \varphi_e \).
Положение точки M относительно центра окружности: \( x_M' = R \cos \theta_r \), \( y_M' = R \sin \theta_r \).
Тогда абсолютные координаты точки M: \( x_M = b \cos \varphi_e + R \cos \theta_r \), \( y_M = b \sin \varphi_e + R \sin \theta_r \).
Здесь \( S_r \) - это не \( \theta_r \). Если \( S_r \) - это дуговая координата, то \( S_r = R \theta_r \), откуда \( \theta_r = S_r/R \).
При \( t_1 = 1 \) с:
\[ \varphi_e(1) = 3 \text{ рад} \] \[ S_r(1) = 5\pi \text{ см} \] \[ \theta_r(1) = \frac{S_r(1)}{R} = \frac{5\pi}{20} = \frac{\pi}{4} \text{ рад} \]2.3.1. Переносная скорость \( \vec{V}_e \):
Вектор \( \vec{V}_e \) направлен перпендикулярно радиусу \( \vec{r}_c \) от оси вращения тела 0 до центра окружности.
Координаты центра окружности: \( x_c = b \cos \varphi_e \), \( y_c = b \sin \varphi_e \).
При \( t_1 = 1 \) с, \( \varphi_e = 3 \) рад:
\[ x_c = 10 \cos(3) \approx 10 \cdot (-0.9899) = -9.899 \text{ см} \] \[ y_c = 10 \sin(3) \approx 10 \cdot (0.1411) = 1.411 \text{ см} \]Модуль \( V_e = \omega_e b = 2 \cdot 10 = 20 \text{ см/с} \).
Направление \( \vec{V}_e \) перпендикулярно \( \vec{r}_c \). Угол \( \alpha_e \) вектора \( \vec{V}_e \) с осью X: \( \alpha_e = \varphi_e + \pi/2 \) (если \( \omega_e > 0 \)).
При \( \varphi_e = 3 \) рад:
\[ \alpha_e = 3 + \pi/2 \approx 3 + 1.57 = 4.57 \text{ рад} \]Компоненты \( \vec{V}_e \):
\[ V_{ex} = V_e \cos \alpha_e = 20 \cos(4.57) \approx 20 \cdot (-0.20) = -4 \text{ см/с} \] \[ V_{ey} = V_e \sin \alpha_e = 20 \sin(4.57) \approx 20 \cdot (-0.98) = -19.6 \text{ см/с} \]2.3.2. Относительная скорость \( \vec{V}_r \):
Модуль \( V_r = -\frac{5\pi^2\sqrt{3}}{3} \approx -\frac{5 \cdot (3.14159)^2 \cdot 1.732}{3} \approx -\frac{5 \cdot 9.8696 \cdot 1.732}{3} \approx -\frac{85.57}{3} \approx -28.52 \text{ см/с} \).
Направление \( \vec{V}_r \) перпендикулярно радиусу \( \vec{r}_M' \) от центра окружности до точки M. Угол \( \alpha_r \) вектора \( \vec{V}_r \) с осью X: \( \alpha_r = \varphi_e + \theta_r + \pi/2 \) (если \( V_r > 0 \)). Поскольку \( V_r < 0 \), то \( \alpha_r = \varphi_e + \theta_r - \pi/2 \).
При \( \varphi_e = 3 \) рад, \( \theta_r = \pi/4 \) рад:
\[ \alpha_r = 3 + \pi/4 - \pi/2 = 3 - \pi/4 \approx 3 - 0.785 = 2.215 \text{ рад} \]Компоненты \( \vec{V}_r \):
\[ V_{rx} = |V_r| \cos \alpha_r = 28.52 \cos(2.215) \approx 28.52 \cdot (-0.59) = -16.83 \text{ см/с} \] \[ V_{ry} = |V_r| \sin \alpha_r = 28.52 \sin(2.215) \approx 28.52 \cdot (0.80) = 22.82 \text{ см/с} \]2.3.3. Абсолютная скорость \( \vec{V} \):
\[ V_x = V_{ex} + V_{rx} = -4 - 16.83 = -20.83 \text{ см/с} \] \[ V_y = V_{ey} + V_{ry} = -19.6 + 22.82 = 3.22 \text{ см/с} \]Модуль абсолютной скорости:
\[ V = \sqrt{V_x^2 + V_y^2} = \sqrt{(-20.83)^2 + (3.22)^2} = \sqrt{433.89 + 10.37} = \sqrt{444.26} \approx 21.08 \text{ см/с} \]Направление абсолютной скорости (угол \( \alpha \) с осью X):
\[ \tan \alpha = \frac