school
Общие знания
verified
Решено AI
Решение задачи К.3: Кинематический расчет плоского механизма
help_outline
Условие задачи
lightbulb
Краткий ответ
Решение задачи К.3 включает определение скоростей точек B и C механизма, а также расчет угловой скорости звена, которому они принадлежат, с использованием мгновенного центра скоростей.
Подробное решение
Хорошо, давайте разберем задание К.3. по кинематическому расчету плоского механизма.
Задание К.3. Кинематический расчет плоского механизма
Механизм, состоящий из нескольких звеньев (рис. 13 а,б,в) движется в плоскости чертежа. Исходные данные приведены в таблице 6.
Определить для заданного положения механизма:
1. Скорости точек В и С;
2. Угловую скорость звена, которому эти точки принадлежат.
Указания
В данной задаче исследуется плоскопараллельное движение твердого тела.
Для расчета скоростей удобно пользоваться понятием мгновенного центра скоростей (МЦС). МЦС (т. Р) – это точка, скорость которой в данный момент времени равна нулю. Если эту точку принять за полюс, то скорость любой точки плоской фигуры можно найти как ее скорость во вращении фигуры вокруг МЦС: \(V_A = \omega \cdot AP\), где \(\omega\) – угловая скорость фигуры.
Способы определения МЦС:
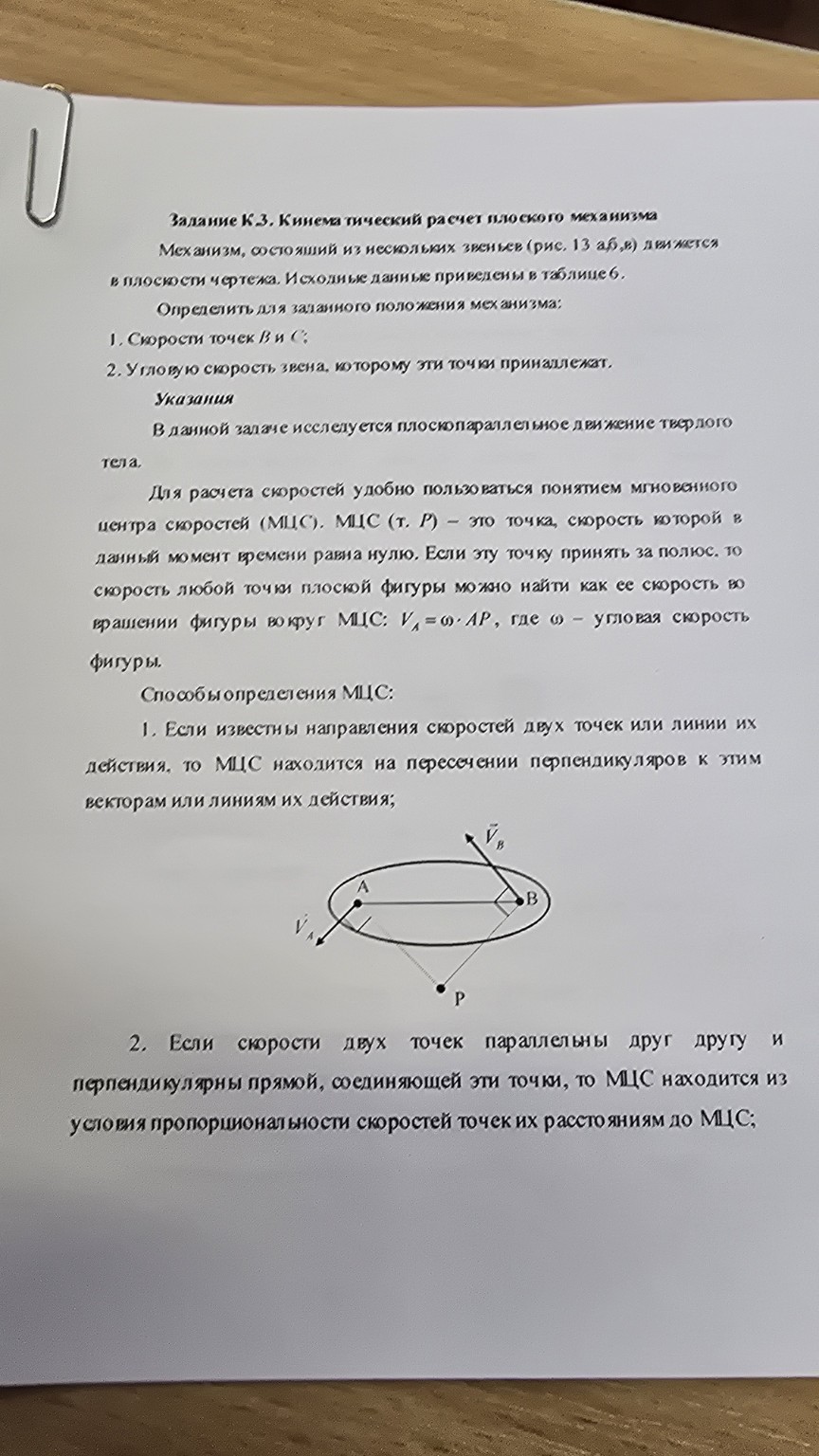
1. Если известны направления скоростей двух точек или линии их действия, то МЦС находится на пересечении перпендикуляров к этим векторам или линиям их действия;
(На рисунке показано, как найти МЦС (P) для двух точек A и B, если известны направления их скоростей \(V_A\) и \(V_B\). Из точек A и B проводятся перпендикуляры к векторам скоростей, и точка их пересечения является МЦС P.)
2. Если скорости двух точек параллельны друг другу и перпендикулярны прямой, соединяющей эти точки, то МЦС находится из условия пропорциональности скоростей точек их расстояниям до МЦС;
---
Теперь давайте разберем, как решать эту задачу, основываясь на предоставленных указаниях.
Для решения задачи нам потребуется:
1. **Исходные данные из таблицы 6** (которые не представлены на изображении, но необходимы для конкретных расчетов). Эти данные будут включать размеры звеньев и, возможно, скорости или угловые скорости каких-либо начальных точек или звеньев.
2. **Рисунок 13 а,б,в** (который также не представлен, но показывает схему механизма).
Предположим, что у нас есть эти данные.
**Общий план решения:**
1. **Определение МЦС для звена, содержащего точки B и C.**
* Для этого нам нужно знать направления скоростей хотя бы двух точек этого звена, или скорость одной точки и направление скорости другой.
* Если известны направления скоростей двух точек (например, A и B), то МЦС (P) находится на пересечении перпендикуляров, проведенных к векторам скоростей из этих точек.
* Если скорости двух точек параллельны и перпендикулярны прямой, соединяющей эти точки, то МЦС находится на этой прямой, и его положение определяется из пропорции: \(\frac{V_A}{AP} = \frac{V_B}{BP}\).
2. **Расчет угловой скорости звена.**
* Как только мы найдем МЦС (P) и знаем скорость одной из точек звена (например, \(V_A\)), мы можем найти угловую скорость \(\omega\) этого звена по формуле:
\[\omega = \frac{V_A}{AP}\]
* Здесь \(AP\) – это расстояние от точки A до МЦС P.
3. **Расчет скоростей точек B и C.**
* После того как мы определили угловую скорость \(\omega\) звена и нашли МЦС (P), мы можем найти скорости любых других точек этого звена (B и C) по формулам:
\[V_B = \omega \cdot BP\]
\[V_C = \omega \cdot CP\]
* Здесь \(BP\) и \(CP\) – это расстояния от точек B и C до МЦС P соответственно. Направления скоростей \(V_B\) и \(V_C\) будут перпендикулярны отрезкам \(BP\) и \(CP\) соответственно.
**Пример (гипотетический, так как нет исходных данных):**
Допустим, у нас есть звено AB, и мы знаем скорость точки A, \(V_A = 0.5 \text{ м/с}\), и ее направление. Также мы знаем направление скорости точки B.
1. **Находим МЦС (P):**
* Проводим перпендикуляр к вектору \(V_A\) из точки A.
* Проводим перпендикуляр к вектору \(V_B\) из точки B.
* Точка пересечения этих перпендикуляров – это МЦС P.
* Измеряем расстояния \(AP\) и \(BP\) на чертеже (или вычисляем их по координатам).
2. **Вычисляем угловую скорость \(\omega\):**
* Пусть \(AP = 0.2 \text{ м}\).
* Тогда \[\omega = \frac{V_A}{AP} = \frac{0.5 \text{ м/с}}{0.2 \text{ м}} = 2.5 \text{ рад/с}\]
3. **Вычисляем скорость точки B (и C, если она на этом же звене):**
* Пусть \(BP = 0.3 \text{ м}\).
* Тогда \[V_B = \omega \cdot BP = 2.5 \text{ рад/с} \cdot 0.3 \text{ м} = 0.75 \text{ м/с}\]
* Если точка C также принадлежит этому звену, и расстояние \(CP = 0.4 \text{ м}\), то
\[V_C = \omega \cdot CP = 2.5 \text{ рад/с} \cdot 0.4 \text{ м} = 1.0 \text{ м/с}\]
**Важные моменты для школьника:**
* **Аккуратность чертежа:** При графическом определении МЦС очень важна точность построения перпендикуляров.
* **Единицы измерения:** Всегда следите за единицами измерения. Скорость в м/с, расстояние в м, угловая скорость в рад/с.
* **Векторы:** Скорости – это векторы, они имеют не только величину, но и направление. Направление скорости точки всегда перпендикулярно радиусу, проведенному от МЦС к этой точке.
Для полного решения задачи мне нужны конкретные данные из таблицы 6 и рисунок 13. Если вы предоставите их, я смогу выполнить расчеты.