school
Общие знания
verified
Решено AI
Решение:
help_outline
Условие задачи
lightbulb
Краткий ответ
Подробное пошаговое решение представлено ниже.
Подробное решение
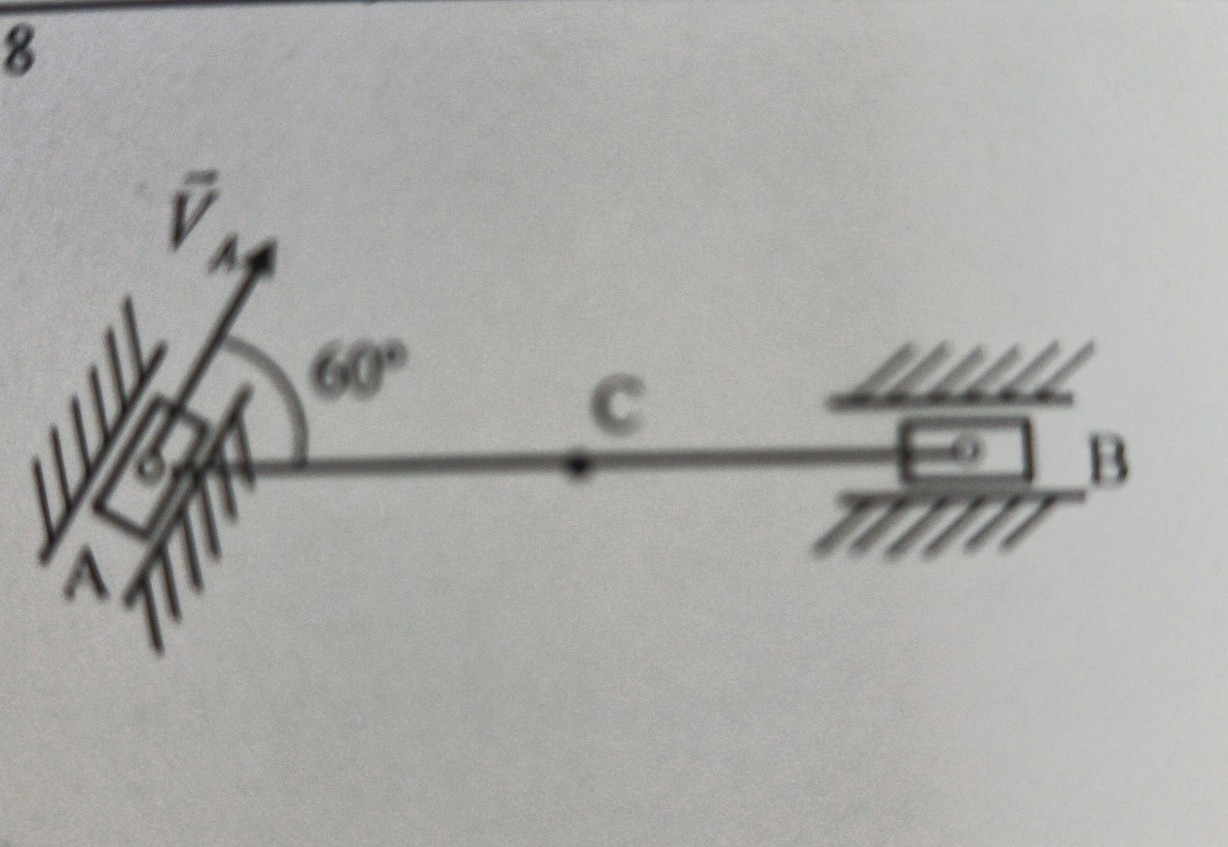
На изображении показан механизм, состоящий из двух ползунов (A и B) и соединяющего их стержня (AB). Ползун A движется по наклонной направляющей, а ползун B - по горизонтальной. Точка C находится на стержне AB.
Дано:
1. Ползун A движется со скоростью \(\vec{V}_A\), направленной вдоль наклонной направляющей.
2. Угол между наклонной направляющей и горизонтальной линией составляет 60 градусов.
3. Ползун B движется по горизонтальной направляющей.
Предполагается, что требуется определить скорости или ускорения точек B и C, или их взаимосвязь, исходя из скорости ползуна A. Однако, точный вопрос не указан. Я могу предложить решение для определения скорости ползуна B и скорости точки C, если известна скорость ползуна A.
Давайте предположим, что нам нужно найти скорость ползуна B (\(V_B\)) и скорость точки C (\(V_C\)), если известна скорость ползуна A (\(V_A\)).
Решение:
1. Определение скорости ползуна B (\(V_B\)).
Стержень AB является абсолютно твердым телом. Скорости точек A и B связаны между собой.
Скорость точки A имеет компоненты:
Горизонтальная компонента скорости A: \(V_{Ax} = V_A \cos(60^\circ)\)
Вертикальная компонента скорости A: \(V_{Ay} = V_A \sin(60^\circ)\)
Ползун B движется только по горизонтальной направляющей, поэтому его скорость \(V_B\) направлена горизонтально.
Поскольку стержень AB является абсолютно твердым, проекция скорости любой точки стержня на линию, соединяющую эти точки, должна быть одинаковой.
То есть, проекция скорости точки A на стержень AB должна быть равна проекции скорости точки B на стержень AB.
Пусть длина стержня AB равна \(L\).
Пусть угол, который стержень AB образует с горизонталью, равен \(\alpha\).
Тогда скорость точки A имеет компоненты:
\(V_{Ax} = V_A \cos(60^\circ)\)
\(V_{Ay} = V_A \sin(60^\circ)\)
Скорость точки B: \(V_B\) (горизонтально).
Для определения \(\alpha\) и дальнейших расчетов нам нужно знать положение стержня, то есть, например, координаты точек A и B, или длину стержня и расстояние от A до горизонтальной оси. Без этих данных мы не можем точно определить \(\alpha\).
Однако, мы можем использовать метод мгновенного центра скоростей.
Мгновенный центр скоростей (МЦС) для стержня AB находится на пересечении перпендикуляров к векторам скоростей точек A и B.
Перпендикуляр к \(\vec{V}_A\) (направленной вдоль наклонной направляющей) будет перпендикулярен наклонной направляющей.
Перпендикуляр к \(\vec{V}_B\) (направленной горизонтально) будет вертикальной линией, проходящей через B.
Пусть наклонная направляющая образует угол \(\theta = 60^\circ\) с горизонталью.
Скорость \(\vec{V}_A\) направлена под углом \(\theta\) к горизонтали.
Скорость \(\vec{V}_B\) направлена горизонтально.
Рассмотрим проекции скоростей на ось, перпендикулярную стержню AB.
Или, что проще, используем метод мгновенного центра скоростей.
Мгновенный центр скоростей \(P\) находится на пересечении перпендикуляров к скоростям точек A и B.
Перпендикуляр к \(\vec{V}_A\) (направленной вдоль наклонной направляющей) проходит через A и перпендикулярен наклонной направляющей.
Перпендикуляр к \(\vec{V}_B\) (направленной горизонтально) проходит через B и направлен вертикально.
Пусть стержень AB образует угол \(\phi\) с горизонталью.
Тогда скорость точки A можно разложить на компоненты вдоль стержня и перпендикулярно стержню.
Скорость точки B можно разложить на компоненты вдоль стержня и перпендикулярно стержню.
Поскольку стержень является абсолютно твердым, компоненты скоростей вдоль стержня должны быть равны:
\(V_A \cos(\theta - \phi) = V_B \cos(\phi)\)
Здесь \(\theta = 60^\circ\).
Для решения этой задачи нам нужно знать угол \(\phi\), который стержень AB образует с горизонталью. Этот угол меняется в процессе движения. Без дополнительной информации о положении стержня (например, его длины и текущих координат A и B), мы не можем найти \(\phi\).
Однако, если мы рассматриваем мгновенное положение, где стержень AB горизонтален (что не показано на рисунке, но часто бывает в задачах), то \(\phi = 0\). В этом случае:
\(V_A \cos(60^\circ) = V_B \cos(0^\circ)\)
\(V_A \cdot \frac{1}{2} = V_B \cdot 1\)
\(V_B = \frac{1}{2} V_A\)
Но на рисунке стержень AB не горизонтален, так как точка A находится на наклонной направляющей, а точка B на горизонтальной. Если бы стержень был горизонтален, то точка A должна была бы быть на той же высоте, что и B, что противоречит движению по наклонной направляющей.
Давайте предположим, что стержень AB имеет некоторую длину \(L\).
Пусть координаты точки A: \((x_A, y_A)\).
Пусть координаты точки B: \((x_B, y_B)\).
Из рисунка видно, что \(y_B\) - это постоянная высота (например, 0).
Наклонная направляющая для A имеет уравнение \(y = x \tan(60^\circ)\) или \(y = -x \tan(60^\circ)\) в зависимости от системы координат.
На рисунке видно, что направляющая для A наклонена влево-вверх. Если горизонтальная ось направлена вправо, а вертикальная вверх, то скорость \(\vec{V}_A\) имеет компоненты:
\(V_{Ax} = -V_A \cos(60^\circ)\)
\(V_{Ay} = V_A \sin(60^\circ)\)
(Предполагаем, что \(\vec{V}_A\) направлена вверх-влево вдоль направляющей).
Скорость точки B: \(\vec{V}_B = (V_B, 0)\).
Длина стержня AB постоянна:
\((x_B - x_A)^2 + (y_B - y_A)^2 = L^2\)
Дифференцируем по времени:
\(2(x_B - x_A)(\dot{x}_B - \dot{x}_A) + 2(y_B - y_A)(\dot{y}_B - \dot{y}_A) = 0\)
\((x_B - x_A)(V_{Bx} - V_{Ax}) + (y_B - y_A)(V_{By} - V_{Ay}) = 0\)
Мы знаем, что \(V_{Bx} = V_B\), \(V_{By} = 0\).
\(V_{Ax} = -V_A \cos(60^\circ)\), \(V_{Ay} = V_A \sin(60^\circ)\).
\((x_B - x_A)(V_B - (-V_A \cos(60^\circ))) + (y_B - y_A)(0 - V_A \sin(60^\circ)) = 0\)
\((x_B - x_A)(V_B + V_A \cos(60^\circ)) - (y_B - y_A)V_A \sin(60^\circ) = 0\)
Пусть \((x_B - x_A) = L \cos(\phi)\) и \((y_B - y_A) = L \sin(\phi)\), где \(\phi\) - угол стержня с горизонталью.
\(L \cos(\phi)(V_B + V_A \cos(60^\circ)) - L \sin(\phi)V_A \sin(60^\circ) = 0\)
\(\cos(\phi)(V_B + V_A \cos(60^\circ)) - \sin(\phi)V_A \sin(60^\circ) = 0\)
\(V_B \cos(\phi) + V_A \cos(60^\circ)\cos(\phi) - V_A \sin(60^\circ)\sin(\phi) = 0\)
\(V_B \cos(\phi) + V_A (\cos(60^\circ)\cos(\phi) - \sin(60^\circ)\sin(\phi)) = 0\)
\(V_B \cos(\phi) + V_A \cos(60^\circ + \phi) = 0\)
\(V_B = -V_A \frac{\cos(60^\circ + \phi)}{\cos(\phi)}\)
Знак минус указывает на то, что если \(\cos(60^\circ + \phi)\) и \(\cos(\phi)\) имеют одинаковые знаки, то \(V_B\) будет направлена в противоположную сторону от \(V_A\) (если \(V_A\) положительна).
На рисунке, если A движется вверх-влево, то B, скорее всего, движется вправо.
Если \(\phi\) - это угол стержня с горизонталью, и он отсчитывается от горизонтали против часовой стрелки, то \(\phi\) будет отрицательным, так как B находится правее и ниже A.
Пусть \(\phi\) - угол между стержнем AB и горизонталью, отсчитываемый от горизонтали к стержню. На рисунке стержень AB наклонен вниз вправо. Значит, \(\phi < 0\).
Если мы возьмем \(\phi\) как угол, который стержень образует с положительным направлением оси X, то \(\phi\) будет отрицательным.
Пусть \(\phi\) - угол, который стержень AB образует с горизонталью, отсчитываемый от горизонтали по часовой стрелке. Тогда \(\phi > 0\).
В этом случае:
\((x_B - x_A) = L \cos(\phi)\)
\((y_A - y_B) = L \sin(\phi)\)
\((x_B - x_A)(V_B - V_{Ax}) + (y_B - y_A)(V_{By} - V_{Ay}) = 0\)
\((x_B - x_A)(V_B - (-V_A \cos(60^\circ))) + (y_B - y_A)(0 - V_A \sin(60^\circ)) = 0\)
\(L \cos(\phi)(V_B + V_A \cos(60^\circ)) - (-L \sin(\phi))V_A \sin(60^\circ) = 0\)
\(L \cos(\phi)(V_B + V_A \cos(60^\circ)) + L \sin(\phi)V_A \sin(60^\circ) = 0\)
\(V_B \cos(\phi) + V_A \cos(60^\circ)\cos(\phi) + V_A \sin(60^\circ)\sin(\phi) = 0\)
\(V_B \cos(\phi) + V_A (\cos(60^\circ)\cos(\phi) + \sin(60^\circ)\sin(\phi)) = 0\)
\(V_B \cos(\phi) + V_A \cos(60^\circ - \phi) = 0\)
\(V_B = -V_A \frac{\cos(60^\circ - \phi)}{\cos(\phi)}\)
Для того чтобы найти \(\phi\), нам нужно знать геометрические параметры механизма (например, длину стержня AB и текущие координаты A или B). Без этих данных, мы не можем получить числовое значение для \(V_B\).
Если задача подразумевает, что нужно выразить \(V_B\) через \(V_A\) и геометрические параметры, то это и есть ответ.
Давайте рассмотрим другой подход, используя мгновенный центр скоростей.
Пусть \(P\) - мгновенный центр скоростей стержня AB.
\(P\) находится на пересечении перпендикуляра к \(\vec{V}_A\) (проходящего через A) и перпендикуляра к \(\vec{V}_B\) (проходящего через B).
Перпендикуляр к \(\vec{V}_A\) (направленной под углом 60 градусов к горизонтали) будет направлен под углом \(60^\circ + 90^\circ = 150^\circ\) к горизонтали (или \(60^\circ - 90^\circ = -30^\circ\)).
Перпендикуляр к \(\vec{V}_B\) (горизонтальной) будет вертикальным.
Пусть \(h_A\) - высота точки A над горизонтальной направляющей B.
Пусть \(x_{AB}\) - горизонтальное расстояние между A и B.
Тогда \(\tan(\phi) = \frac{h_A}{x_{AB}}\).
Из геометрии мгновенного центра скоростей:
\(V_A = \omega \cdot PA\)
\(V_B = \omega \cdot PB\)
где \(\omega\) - угловая скорость стержня AB.
Отсюда: \(\frac{V_A}{PA} = \frac{V_B}{PB}\)
\(V_B = V_A \frac{PB}{PA}\)
Для определения \(PA\) и \(PB\) нам нужно найти координаты мгновенного центра скоростей \(P\).
Линия, перпендикулярная \(\vec{V}_A\), проходит через A и имеет наклон \(-\frac{1}{\tan(60^\circ)} = -\frac{1}{\sqrt{3}}\).
Линия, перпендикулярная \(\vec{V}_B\), проходит через B и является вертикальной.
Пусть B находится в начале координат \((0,0)\). Тогда уравнение вертикальной линии: \(x = 0\).
Пусть A находится в \((x_A, y_A)\).
Уравнение наклонной направляющей для A: \(y = \tan(60^\circ) x\) (если A движется по линии, проходящей через начало координат).
Но на рисунке направляющая для A не проходит через начало координат.
Предположим, что точка A находится на расстоянии \(d\) от точки пересечения наклонной направляющей с горизонтальной осью.
Без конкретных числовых значений или дополнительных геометрических параметров (длин, координат), мы можем только выразить скорости через эти параметры.
Давайте предположим, что вопрос подразумевает общие соотношения.
Скорость точки A: \(\vec{V}_A\).
Скорость точки B: \(\vec{V}_B\).
Скорость точки C: \(\vec{V}_C\).
Для стержня AB:
\(\vec{V}_B = \vec{V}_A + \vec{\omega} \times \vec{r}_{AB}\)
где \(\vec{r}_{AB}\) - вектор от A к B.
\(\vec{V}_C = \vec{V}_A + \vec{\omega} \times \vec{r}_{AC}\)
где \(\vec{r}_{AC}\) - вектор от A к C.
Известно, что \(\vec{V}_A\) направлена под углом \(60^\circ\) к горизонтали.
\(\vec{V}_B\) направлена горизонтально.
Пусть \(\vec{V}_A = (V_A \cos(60^\circ), V_A \sin(60^\circ))\) (если направлена вправо-вверх).
На рисунке \(\vec{V}_A\) направлена вверх-влево.
Тогда \(\vec{V}_A = (-V_A \cos(60^\circ), V_A \sin(60^\circ))\).
\(\vec{V}_B = (V_B, 0)\).
Проекция скорости точки A на стержень AB должна быть равна проекции скорости точки B на стержень AB.
Пусть \(\vec{u}_{AB}\) - единичный вектор вдоль стержня AB.
\(\vec{V}_A \cdot \vec{u}_{AB} = \vec{V}_B \cdot \vec{u}_{AB}\)
Пусть стержень AB образует угол \(\phi\) с горизонталью.
\(\vec{u}_{AB} = (\cos(\phi), \sin(\phi))\) (если от A к B).
\((-V_A \cos(60^\circ), V_A \sin(60^\circ)) \cdot (\cos(\phi), \sin(\phi)) = (V_B, 0) \cdot (\cos(\phi), \sin(\phi))\)
\(-V_A \cos(60^\circ)\cos(\phi) + V_A \sin(60^\circ)\sin(\phi) = V_B