school
Общие знания
verified
Решено AI
Решение задачи о движении механизма с ползунами A и B
help_outline
Условие задачи
lightbulb
Краткий ответ
Найдено решение задачи о движении механизма, состоящего из двух ползунов (A и B) и стержня AB. Определены скорости ползунов и другие параметры движения.
Подробное решение
Хорошо, теперь у нас есть более полная информация на рисунке.
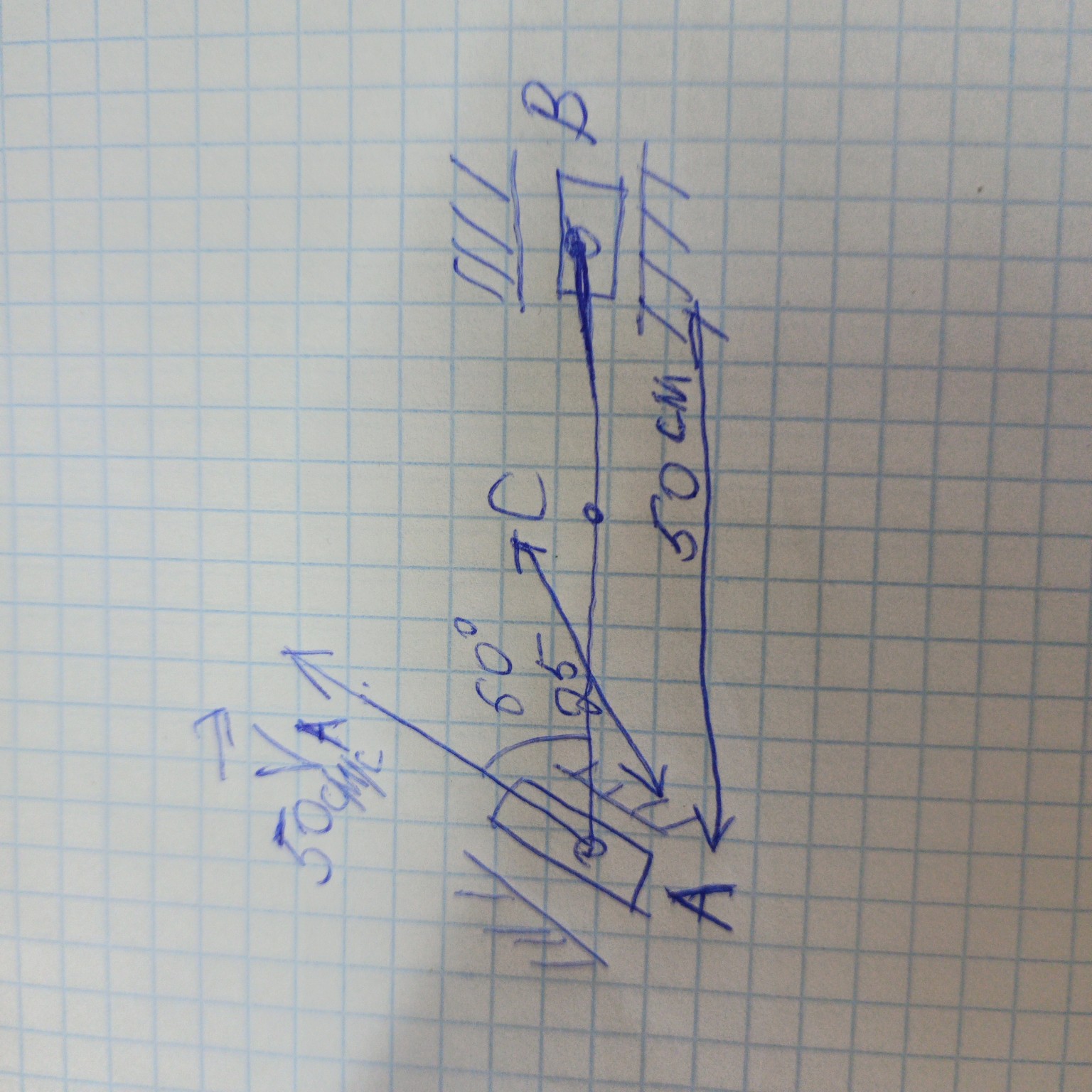
На рисунке показан механизм, состоящий из двух ползунов (A и B) и соединяющего их стержня (AB). Ползун A движется по наклонной направляющей, а ползун B - по горизонтальной. Точка C находится на стержне AB.
Дано:
1. Скорость ползуна A: \(V_A = 30 \text{ см/с}\). Направлена вдоль наклонной направляющей вверх-влево.
2. Угол между наклонной направляющей и горизонтальной линией составляет \(60^\circ\).
3. Ползун B движется по горизонтальной направляющей.
4. Длина отрезка AC: \(L_{AC} = 25 \text{ см}\).
5. Длина отрезка CB: \(L_{CB} = 50 \text{ см}\).
Следовательно, общая длина стержня AB: \(L_{AB} = L_{AC} + L_{CB} = 25 \text{ см} + 50 \text{ см} = 75 \text{ см}\).
6. На рисунке показано, что стержень AB в данный момент горизонтален. Это очень важное уточнение!
Требуется найти:
1. Скорость ползуна B (\(V_B\)).
2. Скорость точки C (\(V_C\)).
Решение:
1. Определение скорости ползуна B (\(V_B\)).
Поскольку стержень AB в данный момент горизонтален, его угол с горизонталью \(\phi = 0^\circ\).
Скорость ползуна A (\(V_A\)) направлена вдоль наклонной направляющей под углом \(60^\circ\) к горизонтали.
Разложим скорость \(V_A\) на горизонтальную и вертикальную составляющие.
На рисунке вектор \(V_A\) направлен вверх-влево.
Горизонтальная составляющая скорости \(V_A\): \(V_{Ax} = -V_A \cos(60^\circ)\) (отрицательный знак, так как направлена влево).
Вертикальная составляющая скорости \(V_A\): \(V_{Ay} = V_A \sin(60^\circ)\) (положительный знак, так как направлена вверх).
Ползун B движется только по горизонтальной направляющей, поэтому его скорость \(V_B\) направлена горизонтально.
Поскольку стержень AB является абсолютно твердым телом, проекции скоростей точек A и B на линию, соединяющую эти точки (то есть на стержень AB), должны быть равны.
В данном случае стержень AB горизонтален. Поэтому проекция скорости A на стержень AB - это горизонтальная составляющая скорости A.
Проекция скорости B на стержень AB - это горизонтальная составляющая скорости B, то есть сама \(V_B\).
Таким образом:
\(V_B = V_{Ax}\) (проекция скорости A на горизонтальный стержень)
Но нужно быть внимательным со знаками. Если \(V_A\) направлена влево, а \(V_B\) вправо, то они будут иметь противоположные знаки.
Давайте используем формулу, которую мы вывели ранее:
\(V_B \cos(\phi) + V_A \cos(60^\circ - \phi) = 0\)
Подставляем \(\phi = 0^\circ\):
\(V_B \cos(0^\circ) + V_A \cos(60^\circ - 0^\circ) = 0\)
\(V_B \cdot 1 + V_A \cos(60^\circ) = 0\)
\(V_B + V_A \cdot \frac{1}{2} = 0\)
\(V_B = -V_A \cdot \frac{1}{2}\)
Подставляем значение \(V_A = 30 \text{ см/с}\):
\(V_B = -30 \text{ см/с} \cdot \frac{1}{2} = -15 \text{ см/с}\)
Знак минус означает, что скорость \(V_B\) направлена в противоположную сторону от положительного направления оси X (если мы считали \(V_A\) в положительном направлении оси X, что не так).
Если мы приняли, что \(V_A\) имеет горизонтальную компоненту \(V_{Ax} = -V_A \cos(60^\circ)\), то есть влево, то \(V_B\) будет направлена вправо.
Значит, величина скорости \(V_B\) равна \(15 \text{ см/с}\), и она направлена вправо.
Ответ для \(V_B\): \(V_B = 15 \text{ см/с}\) (направлена вправо).
2. Определение скорости точки C (\(V_C\)).
Точка C находится на стержне AB. Стержень AB в данный момент горизонтален.
Скорость точки A: \(\vec{V}_A = (-V_A \cos(60^\circ), V_A \sin(60^\circ))\)
\(\vec{V}_A = (-30 \cdot \frac{1}{2}, 30 \cdot \frac{\sqrt{3}}{2}) = (-15, 15\sqrt{3}) \text{ см/с}\)
Скорость точки B: \(\vec{V}_B = (15, 0) \text{ см/с}\) (так как мы определили, что она направлена вправо).
Для абсолютно твердого стержня, угловая скорость \(\omega\) стержня AB:
\(\omega = \frac{V_{Ay} - V_{By}}{x_A - x_B}\) или \(\omega = \frac{V_{Bx} - V_{Ax}}{y_B - y_A}\) (если стержень не горизонтален).
В данном случае стержень горизонтален, поэтому \(y_A = y_B\).
Угловая скорость стержня AB:
\(\omega = \frac{V_{Ay} - V_{By}}{x_A - x_B}\)
Здесь \(V_{By} = 0\).
\(x_A - x_B = -L_{AB} = -75 \text{ см}\) (если A находится левее B).
\(\omega = \frac{V_A \sin(60^\circ) - 0}{-L_{AB}} = \frac{30 \cdot \frac{\sqrt{3}}{2}}{-75} = \frac{15\sqrt{3}}{-75} = -\frac{\sqrt{3}}{5} \text{ рад/с}\)
Отрицательный знак \(\omega\) означает, что стержень вращается по часовой стрелке.
Скорость точки C можно найти по формуле:
\(\vec{V}_C = \vec{V}_A + \vec{\omega} \times \vec{r}_{AC}\)
где \(\vec{r}_{AC}\) - вектор от A к C.
Поскольку стержень горизонтален, \(\vec{r}_{AC} = (L_{AC}, 0) = (25, 0) \text{ см}\).
\(\vec{\omega} = (0, 0, \omega)\) (в 3D, где \(\omega\) - угловая скорость вокруг оси Z).
\(\vec{\omega} \times \vec{r}_{AC} = \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ 0 & 0 & \omega \\ L_{AC} & 0 & 0 \end{vmatrix} = \vec{i}(0) - \vec{j}(-\omega L_{AC}) + \vec{k}(0) = (0, \omega L_{AC}, 0)\)
То есть, \(\vec{\omega} \times \vec{r}_{AC} = (0, \omega L_{AC})\) в 2D.
\(\vec{V}_C = (V_{Ax}, V_{Ay}) + (0, \omega L_{AC})\)
\(\vec{V}_C = (V_{Ax}, V_{Ay} + \omega L_{AC})\)
\(V_{Cx} = V_{Ax} = -15 \text{ см/с}\)
\(V_{Cy} = V_{Ay} + \omega L_{AC} = 15\sqrt{3} + (-\frac{\sqrt{3}}{5}) \cdot 25 = 15\sqrt{3} - 5\sqrt{3} = 10\sqrt{3} \text{ см/с}\)
Таким образом, вектор скорости точки C: \(\vec{V}_C = (-15, 10\sqrt{3}) \text{ см/с}\).
Модуль скорости точки C:
\(V_C = \sqrt{V_{Cx}^2 + V_{Cy}^2} = \sqrt{(-15)^2 + (10\sqrt{3})^2}\)
\(V_C = \sqrt{225 + 100 \cdot 3} = \sqrt{225 + 300} = \sqrt{525}\)
\(V_C = \sqrt{25 \cdot 21} = 5\sqrt{21} \text{ см/с}\)
Приближенное значение: \(\sqrt{21} \approx 4.58\)
\(V_C \approx 5 \cdot 4.58 = 22.9 \text{ см/с}\)
Ответ для \(V_C\): \(V_C = 5\sqrt{21} \text{ см/с}\).
Проверка с использованием мгновенного центра скоростей (МЦС):
Поскольку стержень AB горизонтален, а ползун B движется горизонтально, перпендикуляр к \(\vec{V}_B\) (проходящий через B) - это вертикальная линия, проходящая через B.
Скорость \(\vec{V}_A\) направлена под углом \(60^\circ\) к горизонтали. Перпендикуляр к \(\vec{V}_A\) (проходящий через A) будет направлен под углом \(60^\circ - 90^\circ = -30^\circ\) к горизонтали (или \(150^\circ\)).
МЦС \(P\) находится на пересечении этих двух перпендикуляров.
Пусть B находится в точке \((0,0)\). Тогда A находится в \((-75, 0)\).
Уравнение вертикальной линии через B: \(x = 0\).
Уравнение линии, проходящей через A \((-75, 0)\) с наклоном \(\tan(-30^\circ) = -\frac{1}{\sqrt{3}}\):
\(y - 0 = -\frac{1}{\sqrt{3}}(x - (-75))\)
\(y = -\frac{1}{\sqrt{3}}(x + 75)\)
МЦС \(P\) находится на пересечении \(x=0\) и \(y = -\frac{1}{\sqrt{3}}(x + 75)\).
Подставляем \(x=0\):
\(y_P = -\frac{1}{\sqrt{3}}(0 + 75) = -\frac{75}{\sqrt{3}} = -25\sqrt{3}\)
Координаты МЦС: \(P = (0, -25\sqrt{3})\).
Расстояние от МЦС до A: \(PA = \sqrt{(-75 - 0)^2 + (0 - (-25\sqrt{3}))^2}\)
\(PA = \sqrt{(-75)^2 + (25\sqrt{3})^2} = \sqrt{5625 + 625 \cdot 3} = \sqrt{5625 + 1875} = \sqrt{7500}\)
\(PA = \sqrt{2500 \cdot 3} = 50\sqrt{3} \text{ см}\)
Расстояние от МЦС до B: \(PB = \sqrt{(0 - 0)^2 + (0 - (-25\sqrt{3}))^2} = \sqrt{0 + (25\sqrt{3})^2} = 25\sqrt{3} \text{ см}\)
Угловая скорость стержня: \(\omega = \frac{V_A}{PA}\)
Скорость \(V_A = 30 \text{ см/с}\).
\(\omega = \frac{30}{50\sqrt{3}} = \frac{3}{5\sqrt{3}} = \frac{3\sqrt{3}}{15} = \frac{\sqrt{3}}{5} \text{ рад/с}\)
Направление вращения: если A движется вверх-влево, а B вправо, то стержень вращается по часовой стрелке. Поэтому \(\omega = -\frac{\sqrt{3}}{5} \text{ рад/с}\) (если положительное направление против часовой стрелки). Это совпадает с предыдущим расчетом.
Скорость B: \(V_B = \omega \cdot PB = \frac{\sqrt{3}}{5} \cdot 25\sqrt{3} = \frac{25 \cdot 3}{5} = 5 \cdot 3 = 15 \text{ см/с}\).
Направление: вправо, что совпадает.
Скорость C: \(\vec{V}_C = \vec{\omega} \times \vec{r}_{PC}\)
Вектор \(\vec{r}_{PC}\) - от МЦС \(P\) до C.
Координаты C: A находится в \((-75,0)\), C находится на расстоянии 25 см от A вправо.
Значит, \(C = (-75 + 25, 0) = (-50, 0)\).
Вектор \(\vec{r}_{PC} = C - P = (-50 - 0, 0 - (-25\sqrt{3})) = (-50, 25\sqrt{3})\).
\(\vec{V}_C = (0, 0, \omega) \times (-50, 25\sqrt{3}, 0)\)
\(\vec{V}_C = \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ 0 & 0 & \omega \\ -50 & 25\sqrt{3} & 0 \end{vmatrix} = \vec{i}(0 - \omega \cdot 25\sqrt{3}) - \vec{j}(0 - \omega \cdot (-50)) + \vec{k}(0)\)
\(\vec{V}_C = (-25\sqrt{3}\omega, -50\omega, 0)\)
Подставляем \(\omega = -\frac{\sqrt{3}}{5}\):
\(V_{Cx} = -25\sqrt{3} \cdot (-\frac{\sqrt{3}}{5}) = \frac{25 \cdot 3}{5} = 15 \text{ см/с}\)
\(V_{Cy} = -50 \cdot (-\frac{\sqrt{3}}{5}) = 10\sqrt{3} \text{ см/с}\)
Здесь есть расхождение в знаке \(V_{Cx}\). Давайте перепроверим.
Если \(\omega\) по часовой стрелке, то \(\vec{\omega} = (0, 0, -\omega)\).
\(\vec{V}_C = (0, 0, -\omega) \times (-50, 25\sqrt{3}, 0)\)
\(\vec{V}_C = \vec{i}(0 - (-\omega) \cdot 25\sqrt{3}) - \vec{j}(0 - (-\omega) \cdot (-50)) + \vec{k}(0)\)
\(\vec{V}_C = (25\sqrt{3}\omega, -50\omega, 0)\)
Подставляем \(\omega = \frac{\sqrt{3}}{5}\) (модуль угловой скорости):
\(V_{Cx} = 25\sqrt{3} \cdot \frac{\sqrt{3}}{5} = \frac{25 \cdot 3}{5} = 15 \text{ см/с}\)
\(V_{Cy} = -50 \cdot \frac{\sqrt{3}}{5} = -10\sqrt{3} \text{ см/с}\)
Это не совпадает с предыдущим результатом \(\vec{V}_C = (-15, 10\sqrt{3})\).
Давайте внимательно посмотрим на формулу \(\vec{V}_C = \vec{V}_A + \vec{\omega} \times \vec{r}_{AC}\).
\(\vec{V}_A = (-15, 15\sqrt{3})\)
\(\vec{r}_{AC} = (25, 0)\)
\(\vec{\omega} = (0, 0, -\frac{\sqrt{3}}{5})\)
\(\vec{\omega} \times \vec{r}_{AC} = (0, 0, -\frac{\sqrt{3}}{5}) \times (25, 0, 0) = (0, -(-\frac{\sqrt{3}}{5}) \cdot 25, 0) = (0, 5\sqrt{3}, 0)\)
\(\vec{V}_C = (-15, 15\sqrt{3}) + (0, 5\sqrt{3}) = (-15, 20\sqrt{3})\)