schoolГеометрия
verifiedРешено AI
Определение масштаба и построение векторов: решение
help_outlineУсловие задачи
Определи масштаб и объясни построение векторов
lightbulbКраткий ответ
Масштаб определяется путем сравнения численных значений из таблицы с их графическим представлением. Построение векторов осуществляется в системе координат с учетом определенного масштаба для каждой величины.
Подробное решение
На основе представленных изображений (таблицы с расчетными данными и графического построения векторов в системе координат) проведем анализ масштаба и объясним логику построения.
1. Определение масштаба
Для определения масштаба сравним численные значения из таблицы с их графическим представлением на сетке.
Возьмем вектор скорости \( \vec{v} \). Согласно таблице:
\[ v_x = 47 \]
\[ v_y = -40,79 \]
\[ v = 62,31 \]
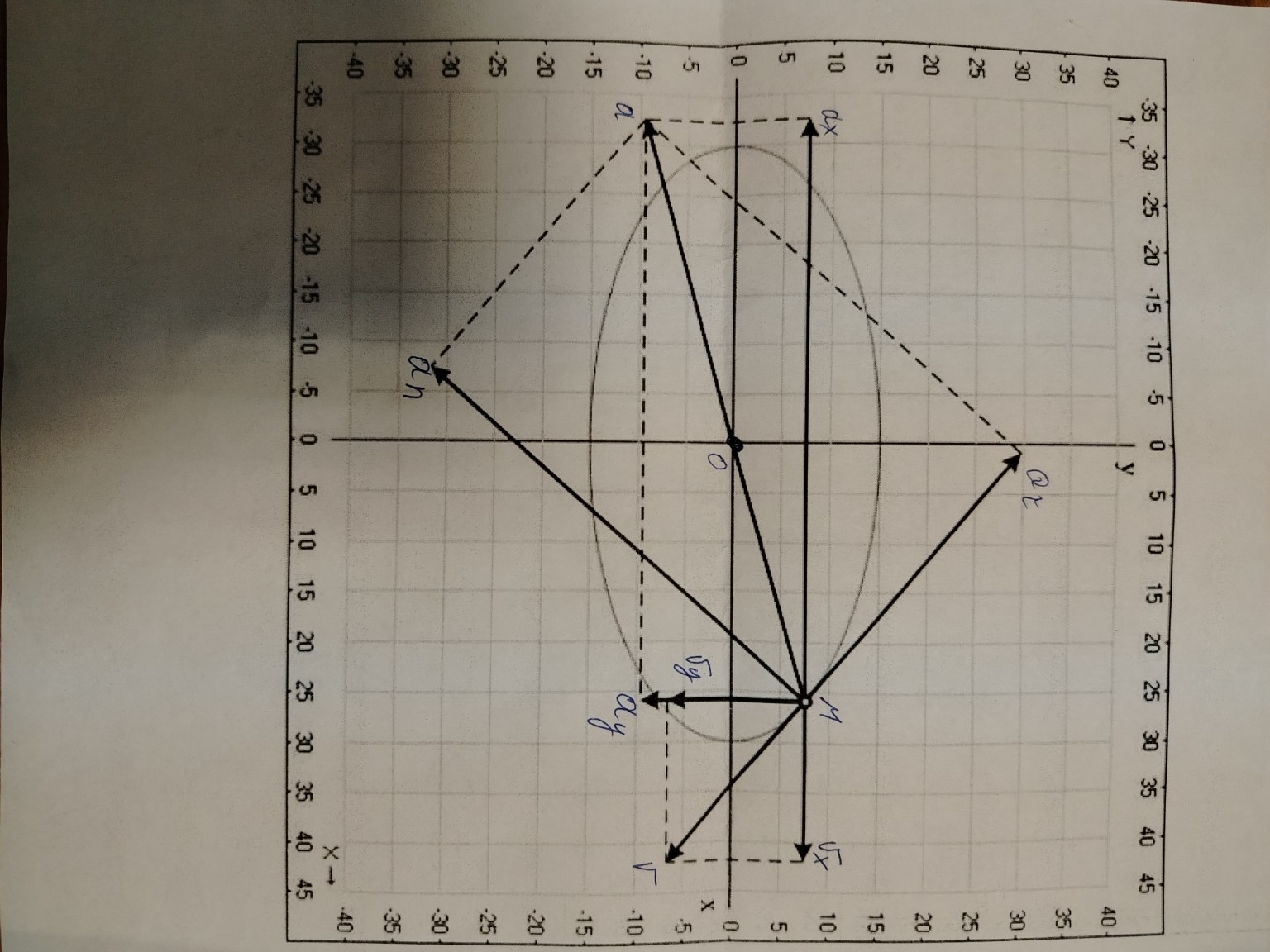
На графике точка \( M \) (точка приложения векторов) имеет координаты \( (10; 25) \). Вектор \( v_x \) отложен от точки \( M \) вправо вдоль оси \( X \). Если посчитать клетки, то длина стрелки \( v_x \) составляет примерно 4,7 деления сетки (где одно деление — это 10 единиц по осям координат).
Следовательно, масштаб для векторов скорости:
\[ \mu_v = 10 \text{ единиц скорости на 1 деление сетки} \]
Теперь рассмотрим векторы ускорения. Согласно таблице:
\[ a_x = -256,15 \]
\[ a_y = -73,95 \]
\[ a = 266,61 \]
На графике вектор \( a_x \) направлен влево от точки \( M \). Его длина составляет примерно 2,5 - 2,6 больших деления сетки.
\[ 256,15 / 2,56 \approx 100 \]
Масштаб для векторов ускорения:
\[ \mu_a = 100 \text{ единиц ускорения на 1 деление сетки} \]
2. Объяснение построения векторов
Построение выполнено для точки \( M \), движущейся по криволинейной траектории (эллипсу).
Векторы скорости:
- \( \vec{v_x} \) и \( \vec{v_y} \) — проекции скорости на оси координат.
- \( \vec{v} \) — полный вектор скорости, построенный как диагональ прямоугольника со сторонами \( v_x \) и \( v_y \). Вектор скорости всегда направлен по касательной к траектории.
Векторы ускорения:
- \( \vec{a_x} \) и \( \vec{a_y} \) — проекции полного ускорения на оси \( X \) и \( Y \).
- \( \vec{a} \) — вектор полного ускорения, построенный по компонентам \( a_x \) и \( a_y \). Он направлен вовнутрь кривизны траектории.
Разложение ускорения на естественные компоненты:
- \( \vec{a_{\tau}} \) (тангенциальное ускорение) — направлено вдоль вектора скорости (или в противоположную сторону при замедлении). Оно отвечает за изменение модуля скорости. На чертеже \( \vec{a_{\tau}} \) направлено в сторону, противоположную \( \vec{v} \), что говорит о замедленном движении.
- \( \vec{a_n} \) (нормальное ускорение) — направлено перпендикулярно вектору скорости к центру кривизны траектории. Оно отвечает за изменение направления скорости.
- Вектор \( \vec{a} \) является геометрической суммой:
\[ \vec{a} = \vec{a_{\tau}} + \vec{a_n} \]
На графике это показано пунктирным прямоугольником, где \( \vec{a} \) является диагональю, а \( \vec{a_{\tau}} \) и \( \vec{a_n} \) — сторонами.
Радиус кривизны:
В таблице указано значение \( \rho = 17,36 \). Это радиус кривизны траектории в данной точке, который связан с нормальным ускорением формулой:
\[ a_n = \frac{v^2}{\rho} \]