schoolМатематика
verifiedРешено AI
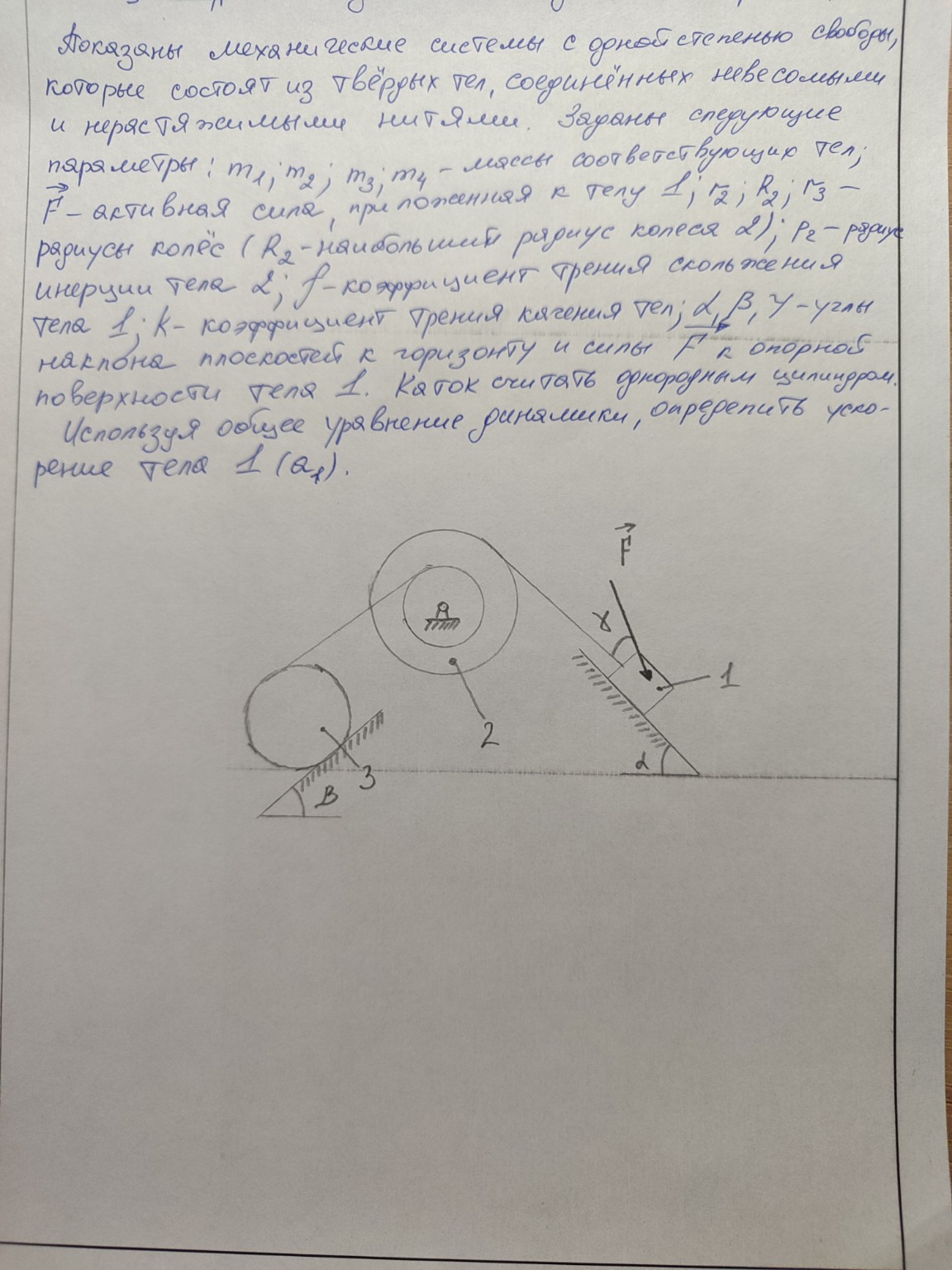
Решение задачи по динамике: блоки и каток
help_outlineУсловие задачи
lightbulbКраткий ответ
Задача решается с помощью принципа Даламбера-Лагранжа, учитывающего кинематические соотношения и активные силы. Вычисляются ускорения тел и угловые скорости блоков.
Подробное решение
Для решения задачи воспользуемся общим уравнением динамики (принципом Даламбера-Лагранжа). Согласно этому принципу, сумма работ всех активных сил и сил инерции на возможном перемещении системы равна нулю.
1. Кинематические соотношения
Пусть \( a_1 \) — ускорение тела 1. Так как нить нерастяжима, скорости и ускорения точек нити связаны с радиусами блоков.
Ускорение нити на внешнем радиусе \( R_2 \) блока 2 равно \( a_1 \).
Угловое ускорение блока 2:
\[ \varepsilon_2 = \frac{a_1}{R_2} \]
Ускорение нити на внутреннем радиусе \( r_2 \) блока 2:
\[ a_{3} = \varepsilon_2 \cdot r_2 = a_1 \frac{r_2}{R_2} \]
Так как каток 3 катится без проскальзывания, ускорение его центра масс равно \( a_3 \), а угловое ускорение:
\[ \varepsilon_3 = \frac{a_3}{r_3} = \frac{a_1 r_2}{R_2 r_3} \]
2. Активные силы и их работа на перемещении \( \delta s_1 \)
Силы, действующие на тело 1:
- Проекция силы тяжести: \( m_1 g \sin \alpha \)
- Проекция силы \( F \): \( F \cos \gamma \)
- Сила трения скольжения: \( F_{tr1} = f \cdot N_1 = f (m_1 g \cos \alpha - F \sin \gamma) \)
Силы, действующие на блок 2:
- Момент сил тяжести равен нулю (ось неподвижна).
Силы, действующие на каток 3:
- Проекция силы тяжести: \( m_3 g \sin \beta \)
- Момент трения качения: \( M_{tr3} = k \cdot N_3 = k \cdot m_3 g \cos \beta \)
3. Составление общего уравнения динамики
Запишем сумму работ на перемещении \( \delta s_1 \):
\[ \sum \delta A_i^a + \sum \delta A_i^{in} = 0 \]
Работа активных сил:
\[ \delta A^a = [F \cos \gamma - m_1 g \sin \alpha - f(m_1 g \cos \alpha - F \sin \gamma)] \delta s_1 + m_3 g \sin \beta \delta s_3 - M_{tr3} \delta \phi_3 \]
Учитывая \( \delta s_3 = \delta s_1 \frac{r_2}{R_2} \) и \( \delta \phi_3 = \frac{\delta s_3}{r_3} \):
\[ \delta A^a = \left( F(\cos \gamma + f \sin \gamma) - m_1 g (\sin \alpha + f \cos \alpha) + m_3 g \sin \beta \frac{r_2}{R_2} - k m_3 g \cos \beta \frac{r_2}{R_2 r_3} \right) \delta s_1 \]
Работа сил инерции:
\[ \delta A^{in} = -m_1 a_1 \delta s_1 - J_2 \varepsilon_2 \delta \phi_2 - m_3 a_3 \delta s_3 - J_3 \varepsilon_3 \delta \phi_3 \]
Где \( J_2 = m_2 \rho_2^2 \), \( J_3 = \frac{1}{2} m_3 r_3^2 \).
Подставляя зависимости от \( a_1 \):
\[ \delta A^{in} = -\left( m_1 + m_2 \frac{\rho_2^2}{R_2^2} + m_3 \frac{r_2^2}{R_2^2} + \frac{1}{2} m_3 \frac{r_2^2}{R_2^2} \right) a_1 \delta s_1 \]
\[ \delta A^{in} = -\left( m_1 + m_2 \frac{\rho_2^2}{R_2^2} + \frac{3}{2} m_3 \frac{r_2^2}{R_2^2} \right) a_1 \delta s_1 \]
4. Итоговая формула для ускорения
Приравнивая сумму работ к нулю и сокращая на \( \delta s_1 \), получаем:
\[ a_1 = \frac{F(\cos \gamma + f \sin \gamma) - m_1 g (\sin \alpha + f \cos \alpha) + m_3 g \frac{r_2}{R_2} (\sin \beta - \frac{k}{r_3} \cos \beta)}{m_1 + m_2 \frac{\rho_2^2}{R_2^2} + \frac{3}{2} m_3 \frac{r_2^2}{R_2^2}} \]
Это выражение позволяет определить ускорение первого тела с учетом всех заданных параметров системы.