schoolФизика
verifiedРешено AI
Определение ускорения тела 1 с помощью уравнения Лагранжа
help_outlineУсловие задачи
lightbulbКраткий ответ
На странице представлено решение задачи по определению ускорения тела 1 в механической системе, использующее уравнение Лагранжа II рода. Рассмотрены кинематические соотношения и расчет угловой скорости блока.
Подробное решение
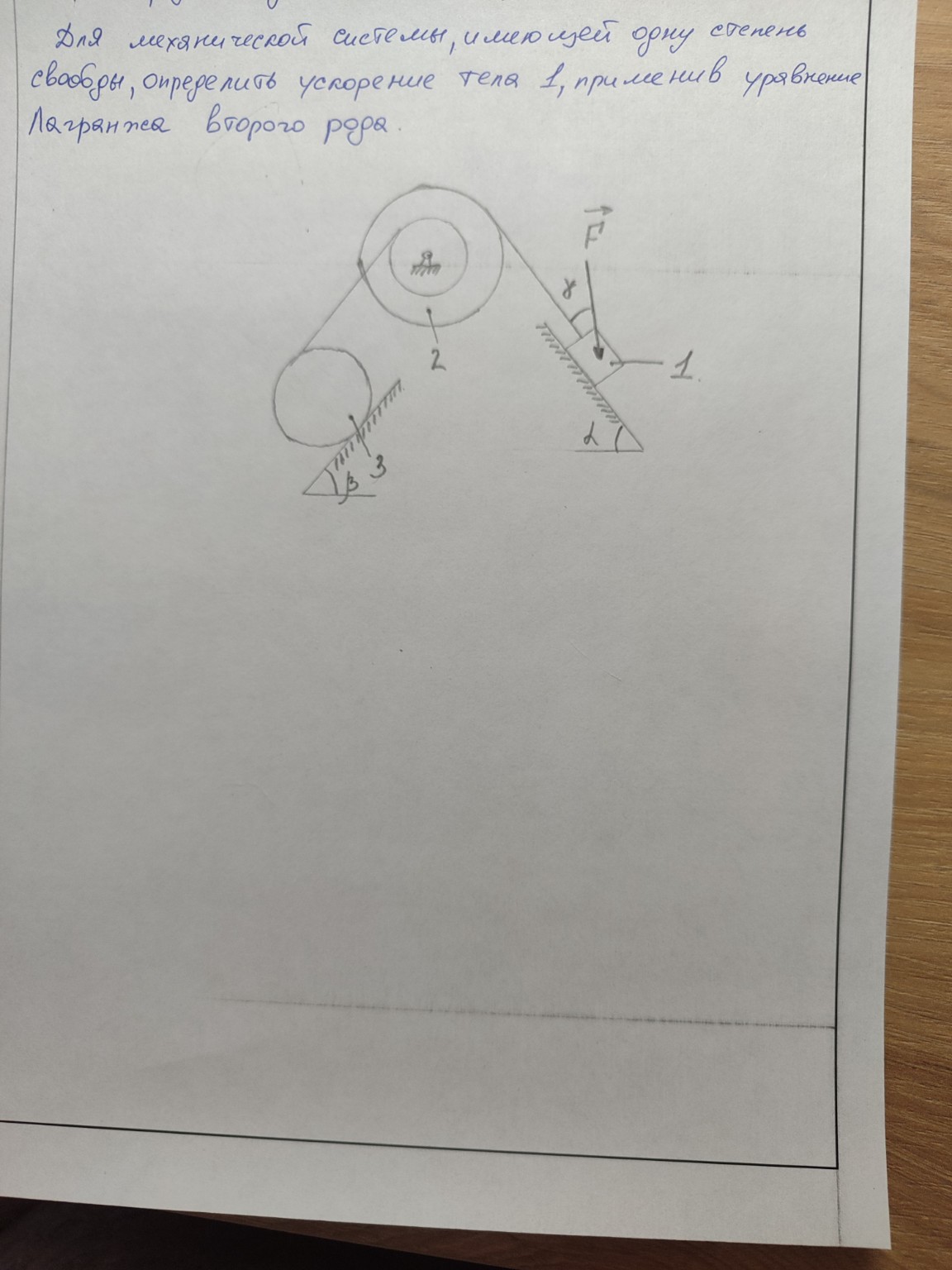
Для механической системы, изображенной на рисунке, определим ускорение тела 1, используя уравнение Лагранжа II рода.
Пусть:
\( m_1 \) — масса тела 1 (груз);
\( m_2 \) — масса тела 2 (ступенчатый блок);
\( m_3 \) — масса тела 3 (катящийся цилиндр);
\( R_2, r_2 \) — радиусы ступеней блока 2;
\( R_3 \) — радиус цилиндра 3.
1. Выбор обобщенной координаты.
Пусть \( x \) — перемещение тела 1 вдоль наклонной плоскости вниз. Тогда скорость тела 1 равна \( v_1 = \dot{x} \).
2. Кинематические соотношения.
Скорость нити на большом радиусе блока 2 равна \( v_1 \). Угловая скорость блока 2:
\[ \omega_2 = \frac{v_1}{R_2} = \frac{\dot{x}}{R_2} \]
Скорость нити, сматывающейся с малого радиуса \( r_2 \), равна \( v_{нитки} = \omega_2 \cdot r_2 = \dot{x} \frac{r_2}{R_2} \).
Эта нить заставляет цилиндр 3 катиться без проскальзывания. Скорость центра масс цилиндра 3 связана с угловой скоростью \( \omega_3 \) и скоростью нити. При качении без проскальзывания \( v_3 = \omega_3 R_3 \). Скорость верхней точки цилиндра (где прикреплена нить) равна \( 2v_3 \).
Следовательно, \( 2v_3 = \dot{x} \frac{r_2}{R_2} \), откуда \( v_3 = \dot{x} \frac{r_2}{2R_2} \) и \( \omega_3 = \frac{\dot{x} r_2}{2R_2 R_3} \).
3. Кинетическая энергия системы \( T \).
\[ T = T_1 + T_2 + T_3 \]
\[ T_1 = \frac{1}{2} m_1 \dot{x}^2 \]
\[ T_2 = \frac{1}{2} J_2 \omega_2^2 = \frac{1}{2} (k_2 m_2 R_2^2) \left(\frac{\dot{x}}{R_2}\right)^2 \] (где \( k_2 \) — коэффициент инерции блока)
\[ T_3 = \frac{1}{2} m_3 v_3^2 + \frac{1}{2} J_3 \omega_3^2 = \frac{1}{2} m_3 v_3^2 + \frac{1}{2} (\frac{1}{2} m_3 R_3^2) \omega_3^2 = \frac{3}{4} m_3 v_3^2 \]
Подставляя зависимости от \( \dot{x} \):
\[ T = \frac{1}{2} \dot{x}^2 \left[ m_1 + m_2 k_2 + \frac{3}{4} m_3 \left(\frac{r_2}{2R_2}\right)^2 \right] = \frac{1}{2} M_{пр} \dot{x}^2 \]
4. Обобщенная сила \( Q \).
Рассмотрим элементарную работу \( \delta A \) на перемещении \( \delta x \):
\[ \delta A = m_1 g \sin \alpha \cdot \delta x + F \cos \gamma \cdot \delta x - m_3 g \sin \beta \cdot \delta s_3 \]
Так как \( v_3 = \dot{x} \frac{r_2}{2R_2} \), то перемещение \( \delta s_3 = \delta x \frac{r_2}{2R_2} \).
\[ Q = \frac{\delta A}{\delta x} = m_1 g \sin \alpha + F \cos \gamma - m_3 g \sin \beta \frac{r_2}{2R_2} \]
5. Уравнение Лагранжа.
\[ \frac{d}{dt} \left( \frac{\partial T}{\partial \dot{x}} \right) - \frac{\partial T}{\partial x} = Q \]
\[ M_{пр} \ddot{x} = Q \]
Ускорение тела 1 (\( a_1 = \ddot{x} \)):
\[ a_1 = \frac{m_1 g \sin \alpha + F \cos \gamma - m_3 g \sin \beta \frac{r_2}{2R_2}}{m_1 + m_2 k_2 + \frac{3}{16} m_3 \frac{r_2^2}{R_2^2}} \]
Примечание: Значения масс и радиусов в общем виде позволяют подставить конкретные данные из условия задачи. Если блок 2 — однородный диск, то \( k_2 = 1/2 \).