schoolФизика
verifiedРешено AI
Робот с колесным приводом: Заполненное задание
help_outlineУсловие задачи
Заполнить пропуски
lightbulbКраткий ответ
В задании заполнены пропуски, касающиеся преимуществ и недостатков роботов с колесным приводом. Готовое решение поможет понять принципы их работы.
Подробное решение
Ниже представлен заполненный текст задания, который можно переписать в тетрадь. Пропущенные слова вставлены в соответствии с логикой устройства роботов с колёсным приводом.
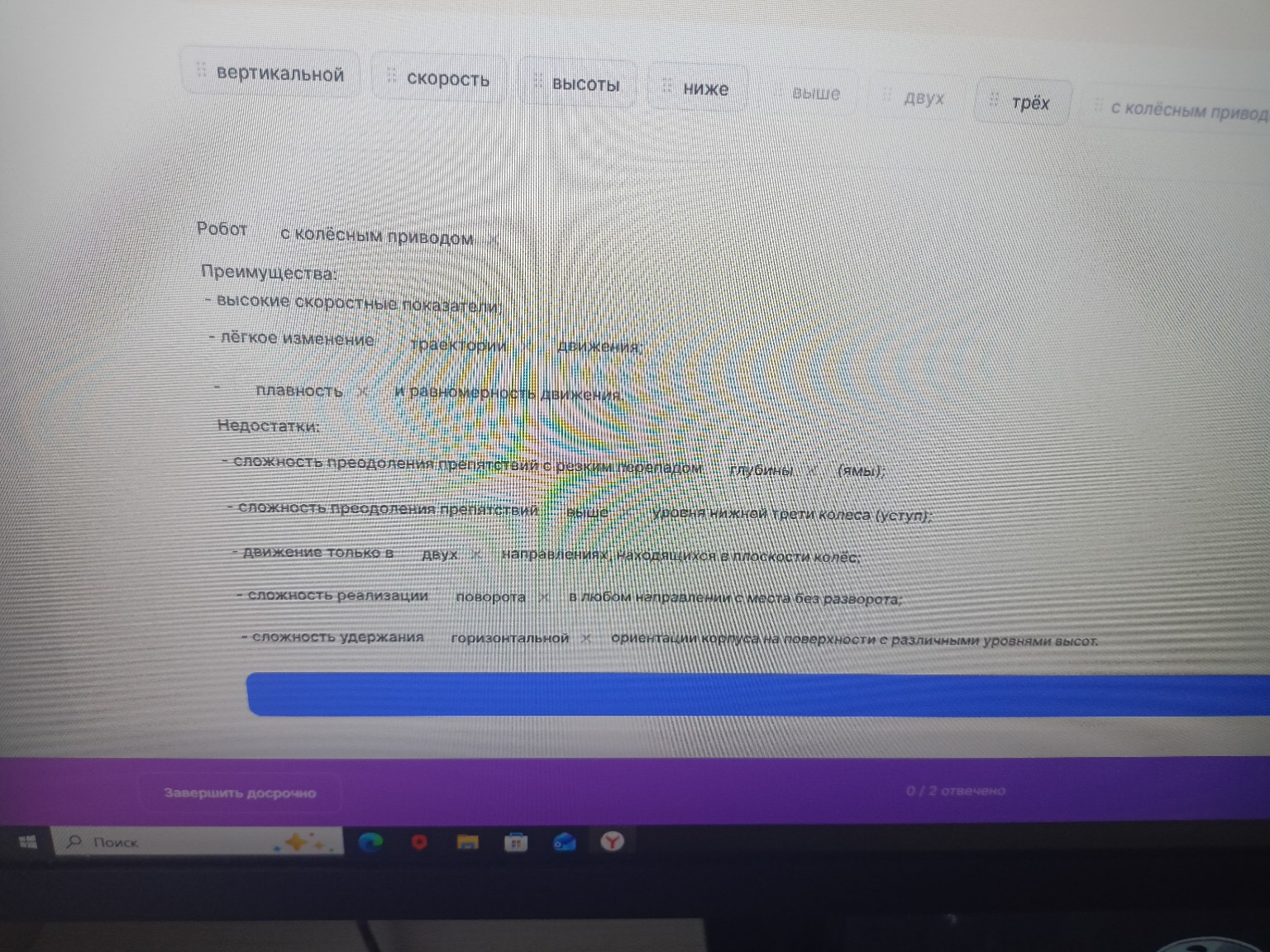
Робот с колёсным приводом.
Преимущества:
— высокие скоростные показатели;
— лёгкое изменение траектории движения;
— плавность и равномерность движения.
Недостатки:
— сложность преодоления препятствий с резким перепадом глубины (ямы);
— сложность преодоления препятствий выше уровня нижней трети колеса (уступ);
— движение только в двух направлениях, находящихся в плоскости колёс;
— сложность реализации поворота в любом направлении с места без разворота;
— сложность удержания горизонтальной ориентации корпуса на поверхности с различными уровнями высот.
Для справки (математическое описание скорости):
Если робот движется равномерно, то пройденный путь \( S \) определяется по формуле:
\[ S = v \cdot t \]
где \( v \) — скорость, \( t \) — время.
Для колёсного робота линейная скорость \( v \) связана с угловой скоростью вращения колеса \( \omega \) и его радиусом \( R \) соотношением:
\[ v = \omega \cdot R \]